Basic Concept of Vibration Monitoring System
Vibration Monitoring System For optimum performance of the machine it is very necessary that parameter like, vibration, speed, position, bearing temperature, pressure and lubricating oil conditions of machine must be monitored continuously so that any change in any parameter could be rectified without any time lag, to avoid any severe damage resulting big financial loss. Vibration is probably the best operating parameter to judge dynamic conditions such as, bearing stability and the dynamic stress applied to components, e.g. balding and gear teeth. In addition other common machinery anomalies (Misaligned couplings and improper clearances) are often manifested as vibration characteristics. By measuring a rotating shaft’s position relative to stationery components, clearances are measured to guard against changes, which would result in severe damage. In machine monitoring system we will be dealing with two kinds of vibration, namely axial vibration or thrust (XT) and radial vibration (VT).
Please check this: Vibration-measurement-basic-parameters
Axial Vibration or Thrust (XT)
Vibration of a shaft in the axial direction with respect to some fixed reference is called axial vibration. Typically the reference is the thrust bearing support structure or other casing member close to the thrust baring.
The measurement is made with proximity probe observing the shaft axially where a known probe gap distance/ voltage represents to the thrust bearing clearance. The probe may observe the thrust caller directly, or some other integral axial shaft surfaces, if such surface’s is closed to the thrust bearing.
Radial Vibration (VT)
Radial vibration is defined as “Shaft dynamic motion in a direction perpendicular to the shaft center line”. Radial vibration is measured in a direction perpendicular to the shaft centerline or continuous monitoring of radial shaft vibration.
Basically “VT” measured by change of gap (Shape of frequency) between probe and gap. It shows certain amplitude that was directly proportional to the clearance (mils) just like,
1 mil= 200 mv (0.2 volts peak to peak amplitude)
So we can say,
That 4 mil= 4 x 200 mv= 0.8 volts peak to peak. Observing
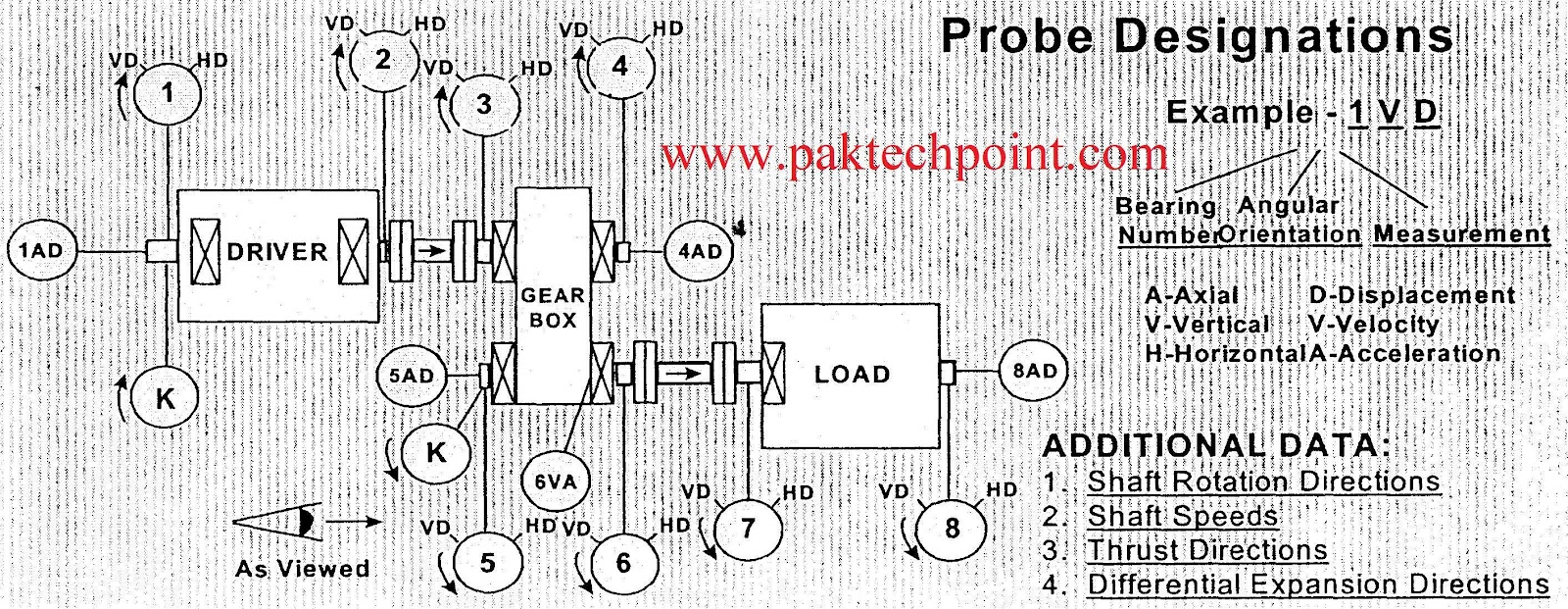
Please check this: Installation-of-vibration-probe
 Fig. Shows Vibration Probe Installation Points in Machine Train.
Fig. Shows Vibration Probe Installation Points in Machine Train.
BASIC SYSTEM OF VIBRATION
Basic system comprises the following components.
- Transducer (Probe)
- Oscillator demodulator (Proximitor)
- Display/ recorder (Monitor)
- Extension Cable
- Safety Barrier
Transducer (Probe)
Probe is the component, which convert the mechanical motion into an electrical signal. A proximity measurement device that radiates an rf field into a given area to allow non-contacting measurements of static and varying gaps. The probe consists of a coil of a wire mounted in a non-conductive plastic or ceramic material, which is housed in a threaded body. The transducer function is to generate a voltage, which, is proportional to the gap-between, the probe trip and the observed surface.
Types of proximity Transducer
It includes RADAR, LASER, CAPACITANCE, and EDDY CURRENT transducer. The method most successfully used for measuring machinery vibration and thrust position monitoring, through is the non-contacting eddy current method.
Principle of measurement of vibration
In operation the probe is excited at a radio frequency of approximately 1.5 MHz generated by the oscillator demodulator and transmitted through the extension cable. This excitation produces a magnetic field radiating from the tip of the probe. The radio frequency excitation to the probe is converted to a DC output proportional to its amplitude.
When the probe tip is brought closer to a conductive material, eddy currents are induced at the surface of the material, extracting energy from the probes excitation and decreasing its amplitude. Thus, as the distance from the probe tip to a conductive material is varied, a corresponding DC voltage is produced at the output of the oscillator demodulator, which varies in proportion to the distance between the probe tip and the conducting material.
Important Points about Transducer
Types of Transducer Tip According to Materials
Fiber glass tip (Brown color)
Ryton tip (Black color)
Ceramic tip
Gold plated
Types of Transducer Coil According to Materials
- Epoxy-fiber glass
- Epoxy-resin
- Silver-wire
Oscillator Demodulator (Proximeter)
Proximeter perform two functions;
- It generates radio frequency of 1.5 MHz to energize the probe.
- It converts the exciting radio frequency to DC output voltage proportional to the distance between probe and measuring objects.
The proximeter uses the de input voltage to generate a radio frequency (rf) 1.5 MHz output voltage, which then is applied to the probe coil through extension cable and probe lead. The probe coil radiates this rf energy into the area near the probe tip as an alternating the magnetic field. Eddy currents are generated whenever any conductive material enters an alternating magnetic field. As the conductive materials approaches the coil, the amplitudes of the eddy currents increases. The eddy currents cause a power loss in the Transducer system, which, results in a decreases in the amplitude of the rf voltage between the probe & proximeter.
Therefore, the amplitude of the rf voltage is a function of gap. As the conductive materials gets closer to the coil, the transducer power loss increases and the amplitude of the rf voltage decreases. The proximeter measures the zero to -ve peak amplitude of the rf signal and provides a proportional output voltage. The total drop voltage of the Transducer is 1.5 V.
Scale Factor = 200 milli volts/ mils
Maximum 0/P Currents = 10 ma
0/P resistance = 50 ohm
Display/ Recorder {Monitor}
Monitor is a display unit which, converts the vibration / thrust signal in required engineering scale, Such as micrometer, mils etc. The monitor card has following functions.
Vibration Loop
The Vibration Monitoring System measures the gap between the probe tip and observed metal surface and converts this distance to a proportional -ve de voltage. The system measures both static (fixed) and dynamic distances. The output signal is fed to a monitor through safety barrier, to determine Such as radial vibration or axial thrust position.
The working of a system is that the probe radiates rf frequency energy from the probe tip coil. As a conductive material (shaft) approaches probe tip, eddy current induced in that material. The closer the conductive material comes to the probe tip, the greater the magnitude of the eddy current. As the eddy current increases, the power energy radiated from the probe tip is absorbed, and there is a corresponding loss in power detected at a proximeter. If the probe-to-shaft gap remains constant, the proximeter output signal remains constant, if the gap changes, the output signal changes accordingly.
Gap Measurement
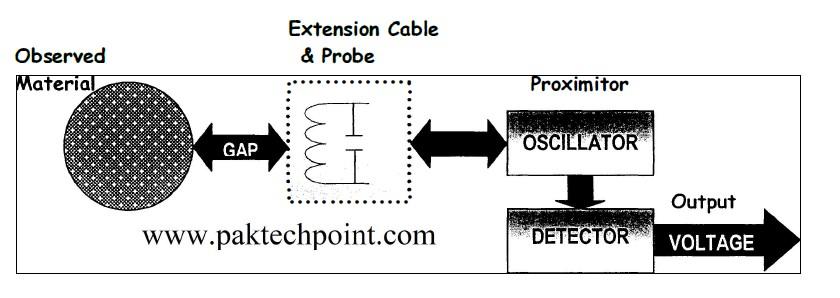
The Proximitor is always powered by -24 volts from an external source, such as a power supply or monitoring device containing an -24 volts power supply. The Proximitor converts the -24 volts into an rf signal that is applied to the probe through the coaxial extension cable as shows in Fig 4. The probe coil radiates the rf signal into the surrounding area as a magnetic field. If there is no conductive material within a specified distance to intercept the magnetic field, there is no power loss in the rf signal. With no power loss in the rf signal, the output signal at the Proximitor OUTPUT terminal is maximum.

When a conductive material approaches the probe tip, eddy currents are generated on the surface of the material, resulting in a power loss in the rf signal. As a power loss is developed in the rf signal, the output signal voltage at the Proximitor OUTPUT terminal is reduced proportionately. As the observed conductive surface comes closer to the probe tip, more power is absorbed by the eddy currents on the surface of the material. When the probe is very close to the conductive material surface, nearly all of the power radiated by the probe is absorbed by the material. This is reflected as a maximum power loss of the rf signal, resulting in a minimum de output signal at the Proximitor output terminal. The Proximitor measures the magnitude of the rf signal, and provides a negative de output signal proportional to the peaks of the rf signal. Thrust measurements and eccentricity measurements are merely gap measurements at a slow rate of change in the gap.
Vibration Measurement
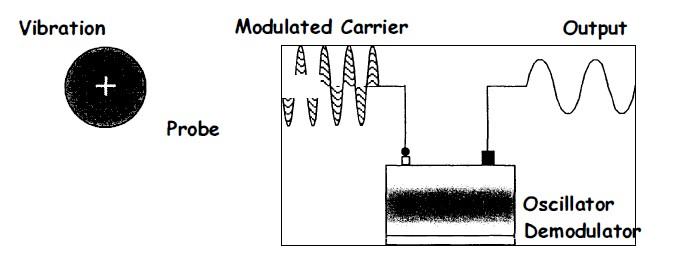
If the observed surface is rotating and rapidly changing the gap distance, the rf signal amplitude is not a constant amplitude, but varies in direct proportion to the peak-to peak movement of the observed surface as shown in Figure.
This peak-to-peak movement of the observed surface causes the rf signal to be amplitude modulated. The Proximitor detects the modulated rf signal as an ac signal varying around a constant average de voltage (Initial probe gap setting) as shown in Figure.
If the shaft vibration is 5-mils peak-to-peak, around an initial gap of 50 mils, the average de voltage of approximately -8.0 volts remain constant, but the ac voltage is one volt peak-to-peak (-7.5 to -8.5 volts) in direct proportion to the shaft vibration (200 mv/mil scale factor), as shown in figure.
Please check this: Vibration Rod drop measurement
This is the process of radial vibration measurements, whether it is single plane or two planes (X-Y).


That's good information thanks
good
thanks
Nice help other instruments information send
jay all information about instrumentation and control is available just navigate our website
Good…….
Write more, thats all I have to say. Literally, it seems as though you relied on the video to make your point. You obviously know what youre talking about, why throw away your intelligence on just posting videos to your site when you could be giving us something informative to read?
Thank you very much keep going… very useful information in understandable manner
Hi! I’ve been reading your weblog for a while now and finally got the courage to go ahead and give you a shout out from Porter Texas! Just wanted to tell you keep up the great work!
Wow, awesome weblog layout! How long have you been running a blog for?
you make blogging glance easy. The full glance of your site is excellent, let alone the content!
thanks
I absolutely love your blog and find the majority of your post’s to
be precisely what I’m looking for. can you offer guest writers to write content in your case?
I wouldn’t mind composing a post or elaborating on some of the subjects you write related to here.
Again, awesome blog!
Hi everybody, here every person is sharing such know-how, thus it’s fastidious to read this weblog,
and I used to visit this blog everyday.