Standardized Rules for Measurement on Rotating Machinery
Introduction
In order to better understand the behavior or rotating machinery, it is most desirable to standardize communication by means of a set of recommended practices defining the polarity and phase referencing of transducers, data storage and data presentation techniques.
This set of transducer orientation and polarity recommendations has been informally developed by machinery engineers and gradually standardized by Bently Nevada Corporation for its customers’ convenience. These recommendations are formulated to remove various possible ambiguities and are fully independent of the direction of rotation, dynamic impedance and dynamic action of the machine.
Non-contacting Relative Displacement
Motion toward the transducer along its sensitive axis shall produce a positive (+) magnitude of voltage or current. The polarity of a relative displacement transducer such as the Bently Nevada proximity probe is easily tested by decreasing gap as shown in Figure 1. The gap can be decreased by either moving the probe towards the observed material, or by moving the observed material towards the probe. Use of a Bently Nevada TK 3 is highly recommended.

Inertially referenced Displacement, Velocity and Acceleration
The polarity of Inertially referenced displacement, velocity or accelerometer transducers is easily tested by means of a tap test. The tap test consists of lightly tapping the transducer in its sensitive axis. The resulting timebase waveform, as shown in Figure 2, is an initially positive (+) going output signal when tapped toward the sensitive axis.

Important: The unit impulse test on Inertially referenced motion transducers is the correct way to established polarity. The required positive (+) response to motion toward the transducer applies to displacement.
Angular Transducer Locations on Rotating
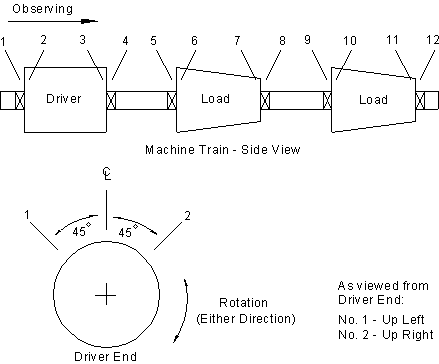
Referencing from the driven end of a horizontal machine train, the transducers shall (when practical) be mounted vertically (above the rotor observing downward) and horizontally (to the right of the rotor observing to the left), or alternatively, above the shaft at 45 left and 45 right. Direction of rotation of the rotor has nothing to do with this rule.
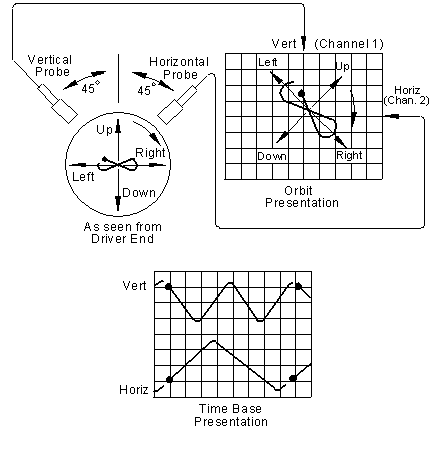
Figure 3 shows a typical orbit display using vertical and horizonal probes. Also shown is the timebase display for this set of input signals.

When transducers are located off vertical and horizontal, typically 45 off vertical centerline, the 45 up left transducer is presented to the oscilloscope vertical input (channel 1) and the 45 up right transducer is presented to the horizontal input (channel 2) when observing from the driver or governor end of the machine. Both orbit and timebase displays for 45 mounted transducers are shown in Figure 4. Figure 5 depicts 45 transducer mounting on a machine train.
This set of angular transducer location rules fills the requirements for orbits, timebase and the phasing relationships for various time correlations, such as for balancing, or determination of forward and reverse dynamic motion, and for preload data. For spectrum analysis work, orientation is of the required correlation data.
Transducers and Instrumentation for Vibration Measurement and Monitoring of Rolling Element Bearings