A radar system is a technology used for detecting, tracking, and identifying objects such as aircraft, ships, vehicles, and weather phenomena by emitting radio waves and analyzing their reflections or echoes from the target objects.
The term “radar” stands for “Radio Detection and Ranging.”
Radar technology, developed before and during World War II, played a pivotal role in aerial battles, with the term “RADAR” coined by the United States Navy in 1941 as an acronym for “radio detection and ranging.” Radar systems typically consist of a transmitter emitting radio signals, which, upon encountering objects, are reflected back to the receiver. By analyzing these signals, the position and movement of objects, such as aircraft, can be determined, aided by the Doppler effect for moving targets.
In aviation, two radar techniques are utilized: primary radar (PSR), which detects objects based on their reflections, and secondary radar (SSR), which requires aircraft to carry transponders that respond to ground-based interrogations with coded data. SSR, standardized by ICAO in the 1980s, enhances air traffic control and surveillance capabilities. PSR presents targets as points without identification, whereas SSR displays targets with unique identification codes and additional data like flight level or velocity, aiding controllers in surveillance tasks.
Radar-based surveillance is deployed across three scenarios: long-range SSR for en-route control, PSR and short-range SSR for approaches, and primary surface radar at airports, each tailored to specific operational needs.
What is Radar System?
What is Radio Detection and Ranging (RADAR)?
Radio Detection and Ranging (RADAR) is a technology used for detecting and tracking objects by transmitting radio waves and analyzing their reflections. There are different configurations of radar systems based on the relative positions of the transmit and receive antennas:
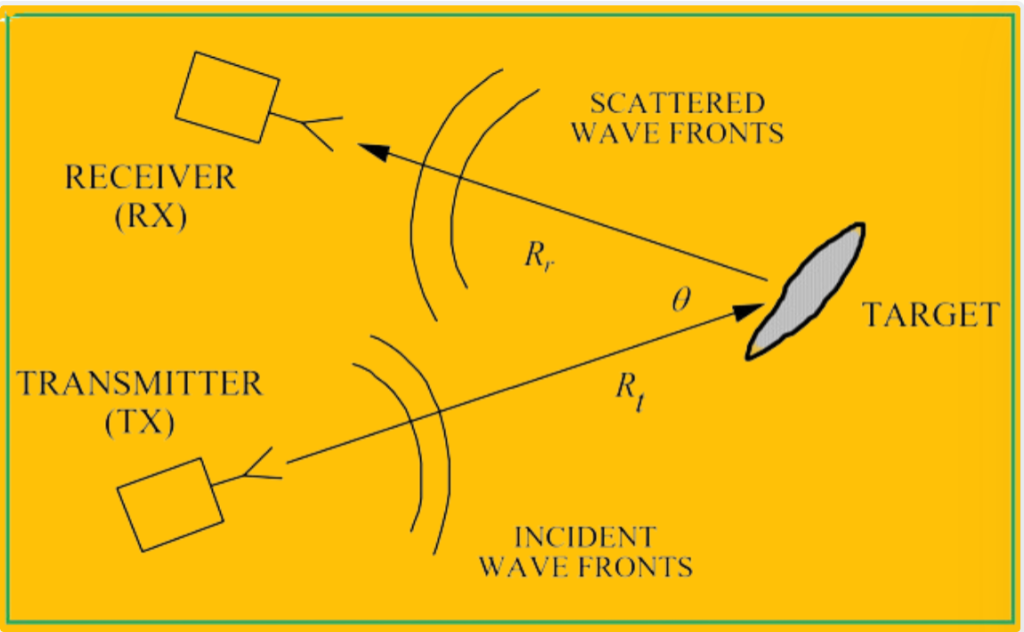
- Bistatic Radar: In bistatic radar systems, the transmit and receive antennas are located at different positions relative to the target. For example, a ground-based transmitter may emit radio waves that are received by an airborne receiver. Bistatic radar configurations offer unique advantages in certain applications, such as stealth detection and space surveillance.
- Monostatic Radar: Monostatic radar systems have the transmit and receive antennas co-located at the same position relative to the target. This means that the same antenna is used to both transmit the radar signals and receive the echoes reflected from the target. Monostatic radar configurations are commonly used in various applications, including air traffic control, weather monitoring, and military surveillance.
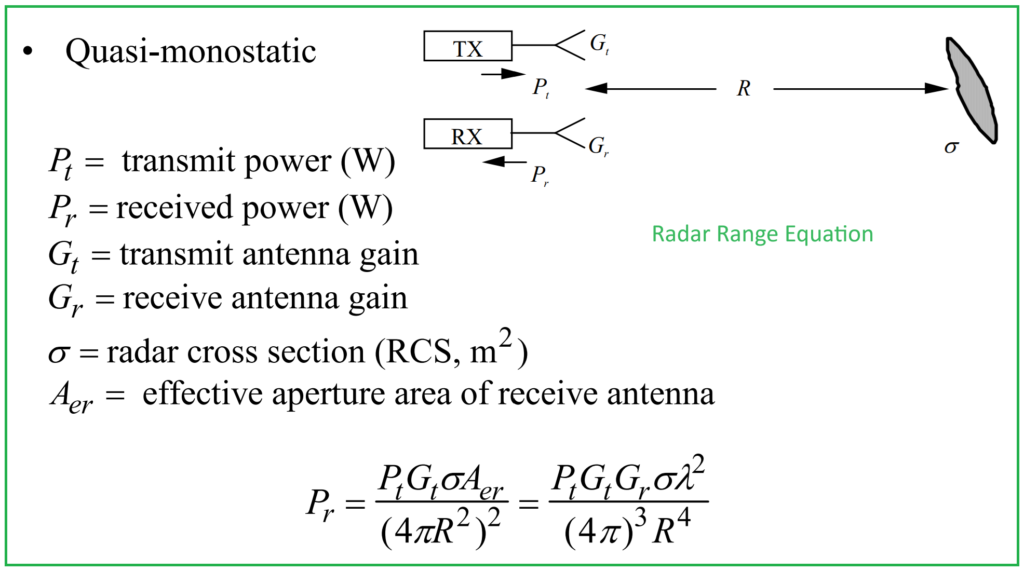
- Quasi-Monostatic Radar: Quasi-monostatic radar systems have the transmit and receive antennas slightly separated, but they still appear to be at the same location as viewed from the target. An example is having separate transmit and receive antennas on the same aircraft. Quasi-monostatic configurations offer some of the advantages of monostatic radar while allowing for flexibility in antenna placement.
Each configuration has its own set of advantages and limitations, and the choice depends on factors such as the specific application, target characteristics, and operational requirements.
1. Radar Functions.
Indeed, radar systems perform several key functions, both basic and advanced, to gather information about targets and the surrounding environment. Here’s a breakdown of these functions:
Normal Radar Functions:
- Range Determination: Radar measures the distance to a target by calculating the time taken for the transmitted pulse to travel to the target and return. This function provides information about the target’s distance from the radar system.
- Velocity Measurement: Radar utilizes the Doppler effect to determine the velocity of moving targets. By analyzing the frequency shift between the transmitted and received signals, radar can determine the speed and direction of the target’s movement.
- Angular Direction Detection: Radar determines the direction of a target by tracking the position of the antenna as it points towards the target. This function allows radar to identify the azimuth and elevation angles of the target relative to the radar system.
Signature Analysis and Inverse Scattering:
- Target Size Estimation: Radar analyzes the magnitude of the return signal to estimate the size of the target. Larger targets typically produce stronger returns, allowing radar systems to infer the size of the target based on the strength of the reflected signal.
- Target Shape and Components Recognition: Radar examines the characteristics of the return signal, such as its polarization and phase, to infer information about the shape and internal components of the target. This function enables radar to distinguish between different types of targets based on their unique signatures.
- Detection of Moving Parts: Radar detects variations in the return signal caused by moving components within a target. By analyzing these modulations, radar can identify rotating parts, such as aircraft propellers or vehicle wheels, within a target.
- Material Composition Analysis: Radar evaluates the composition of the target material based on the properties of the reflected signal, such as its absorption and scattering characteristics. This function allows radar to discriminate between different materials, such as metal, plastic, or vegetation.
The complexity, cost, and size of a radar system increase with the range and sophistication of functions it performs. Advanced radar systems designed for military applications or scientific research often incorporate additional capabilities, such as synthetic aperture radar (SAR) imaging, target tracking algorithms, and electronic warfare functionalities, further enhancing their capabilities and performance.
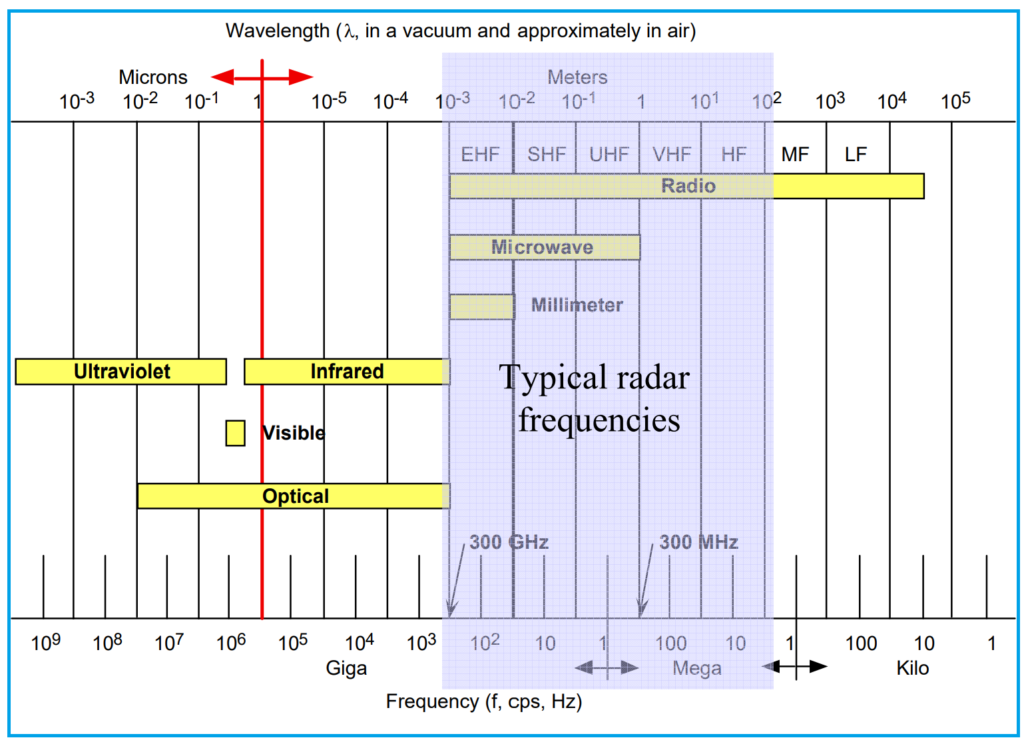
2. Electromagnetic Spectrum.
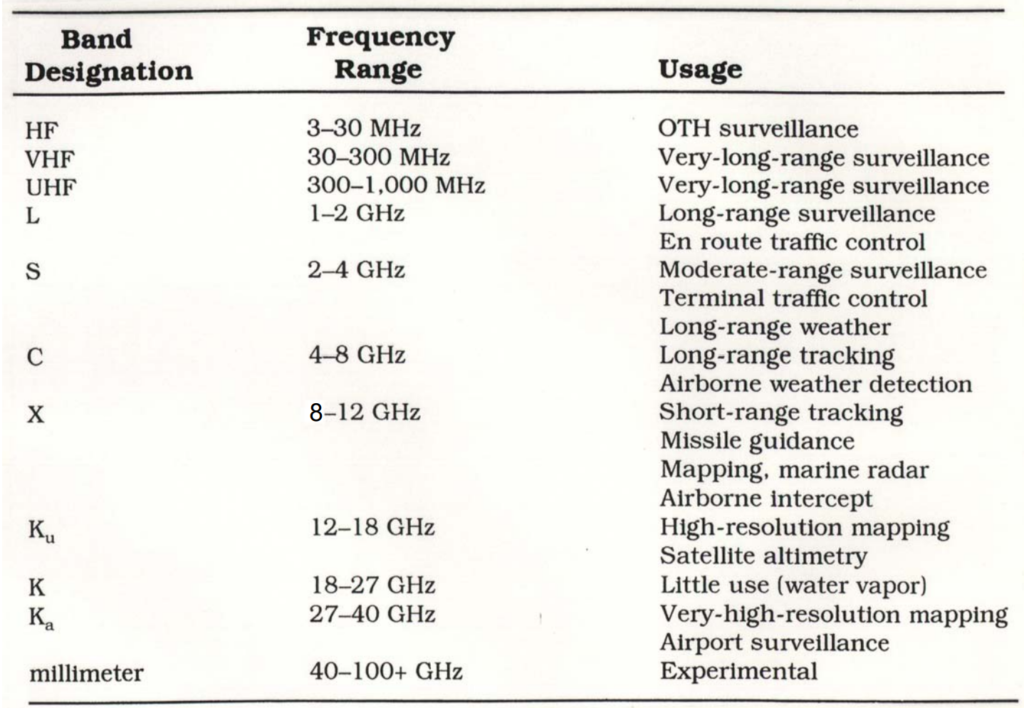
3. Radar Bands and Usage.
4. Time Delay Ranging.
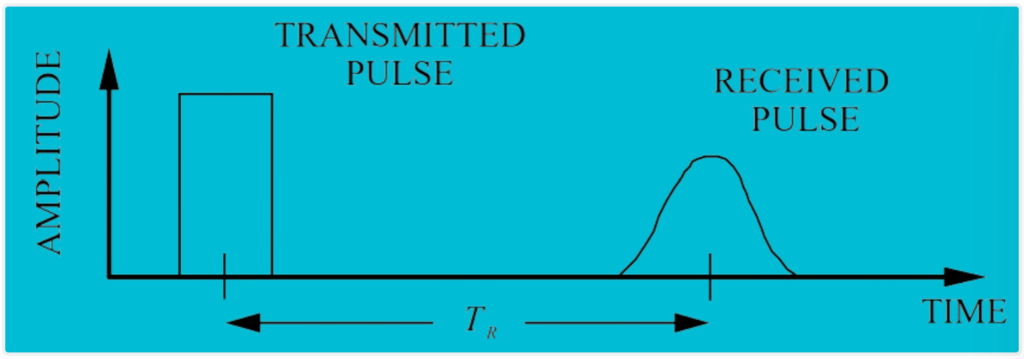
Time delay ranging is a fundamental principle used in radar systems to determine the distance to a target.
The range to a target in radar systems is determined by measuring the round-trip travel time of a transmitted pulse.
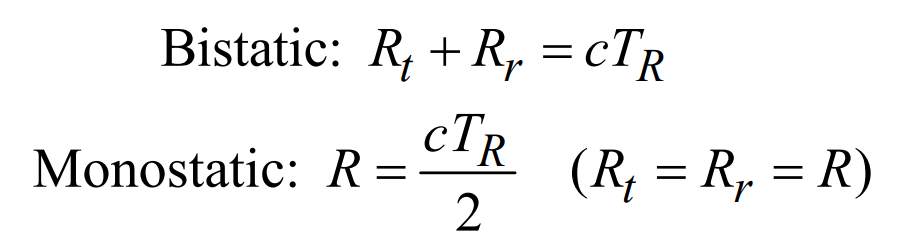
This time delay, denoted Tr, represents the duration for the pulse to travel from the radar system to the target and back. This method applies to both bistatic and monostatic radar systems, where bistatic systems use separate transmitting and receiving antennas, while monostatic systems use a single antenna for both purposes.
where c = 3×108 m/s is the velocity of light in free space.
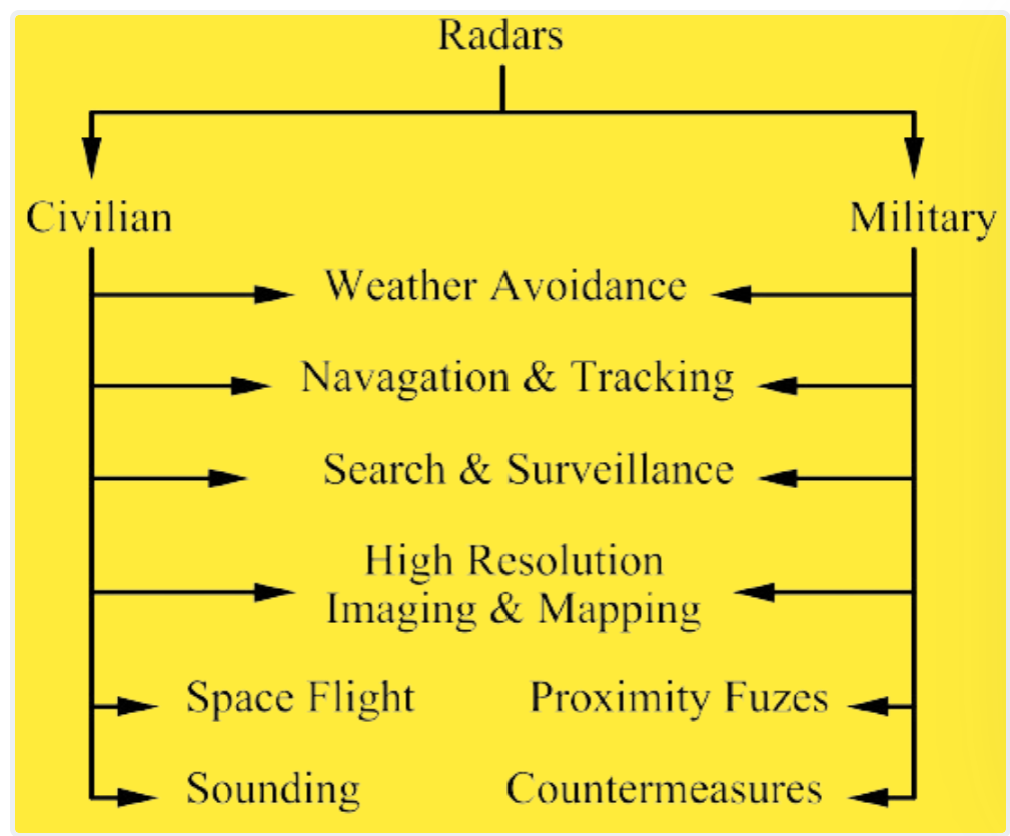
5. Radar System Classification by Function.
Radar systems can be classified by their primary functions:
6. Classification by Waveform.
Radar systems can also be classified by their waveform characteristics:
- Pulse Radar: Emits short pulses of radio waves and measures the time delay for the return signal, primarily used for range measurement.
- Continuous Wave (CW) Radar: Emits a continuous waveform and analyzes changes in frequency or phase for range and velocity measurements.
- Frequency Modulated Continuous Wave (FMCW) Radar: Uses continuous waveforms with varying frequencies to measure range and velocity simultaneously.
- Doppler Radar: Specifically designed to measure velocity by detecting changes in frequency caused by the Doppler effect.
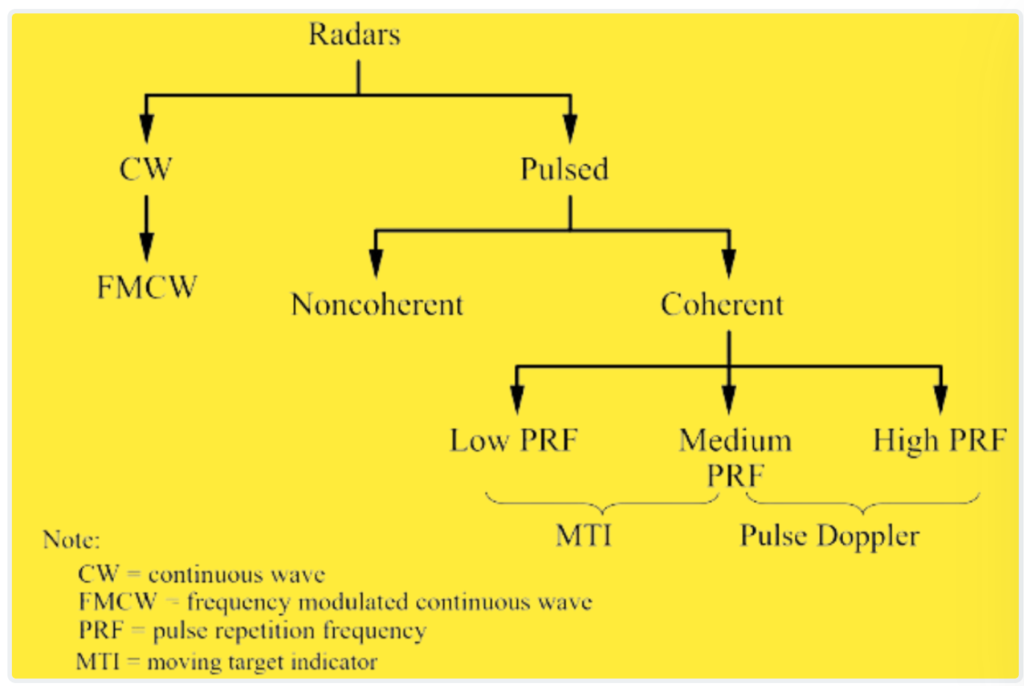
Each waveform type has its advantages and applications depending on the specific requirements of the radar system.
7. Plane Waves.
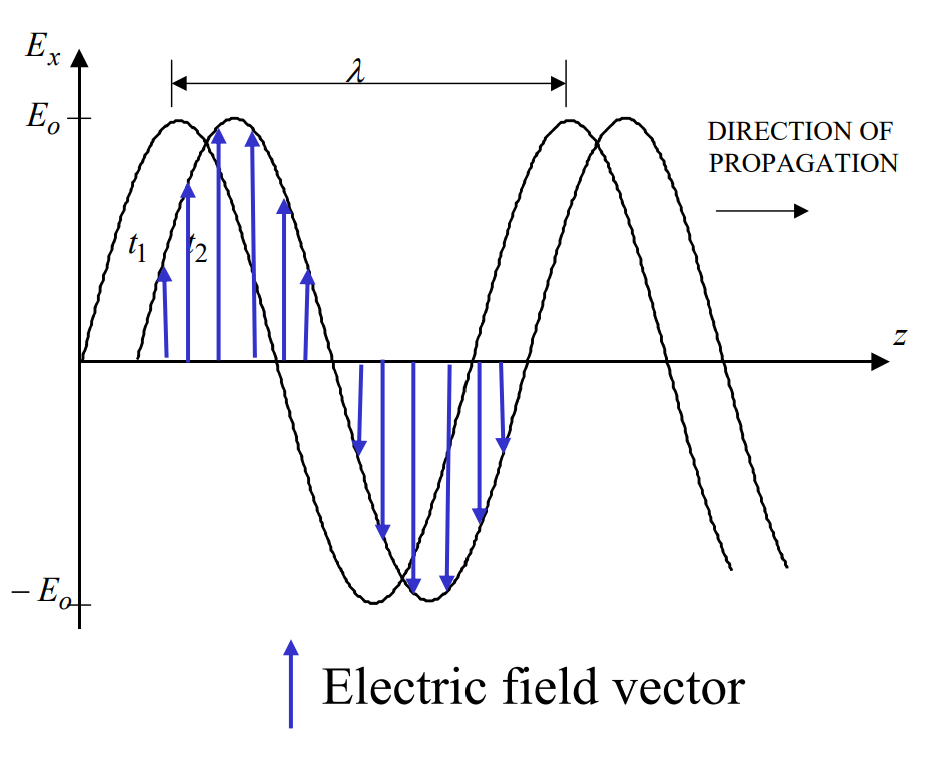
These are key characteristics of a wave propagating in the -direction:
- Wavelength (): The distance between successive crests (or troughs) of the wave.Radian frequency (): The angular frequency, measured in radians per second (). It is related to the frequency () by .Frequency (): The number of complete cycles of the wave that occur per unit time, measured in Hertz (Hz).Phase velocity (): The speed at which the phase of the wave propagates in free space. In free space, it is equal to the speed of light ().Polarization: The direction of the electric field vector (). In this case, it is -polarized, indicating that the electric field oscillates along the -axis.Maximum Amplitude (): The maximum magnitude of the electric field vector () in the wave. It represents the maximum strength of the wave’s electric field.
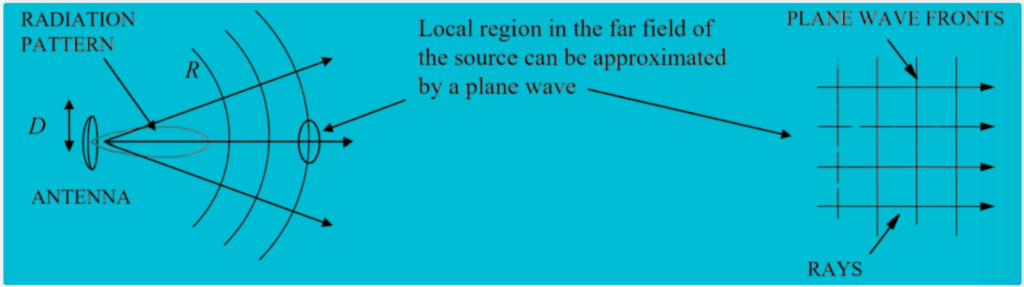
8. Wavefronts and Rays.
Wavefronts and rays are fundamental concepts in wave propagation:
- Wavefronts: These are surfaces representing points of constant phase in a propagating wave. They can be visualized as the fronts of wave crests. In a plane wave, the wavefronts are parallel planes perpendicular to the direction of propagation.
- Rays: Rays represent the direction of energy flow in a wave. They are orthogonal to the wavefronts and indicate the direction in which the wave is traveling. Rays are often used to trace the path of energy propagation and can be bent or refracted when encountering boundaries or changes in medium properties.
In the antenna far-field:
- Waves exhibit a spherical pattern. (R>2D2/ λ)
- At large distances, wavefronts appear locally plane.
- Wave propagation is effectively modeled using a locally plane wave approximation.
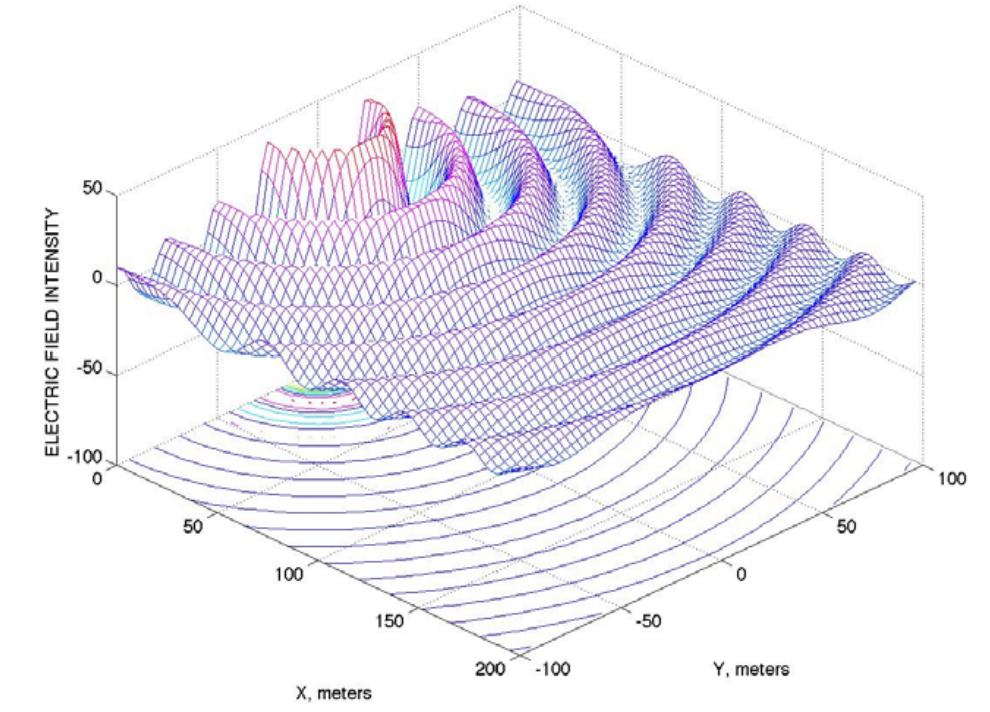
9. Superposition of Waves.
Superposition of waves refers to the combination of two or more waves to form a new wave pattern. This occurs when waves overlap in space and time. The resulting wave is determined by adding the amplitudes of the individual waves at each point in space and time. If the waves are in phase (crest aligns with crest, trough aligns with trough), they reinforce each other and produce a wave with greater amplitude. If they are out of phase (crest aligns with trough), they can cancel each other out, resulting in a wave with reduced or zero amplitude.
When multiple signal sources of the same frequency are present or multiple paths exist between a radar and target, the total signal at a location is the sum, following the superposition principle. This results in interference: constructive interference occurs if the waves add up, while destructive interference occurs if the waves cancel each other out. For instance, ground bounce multi-path can be misinterpreted as multiple targets due to interference effects.
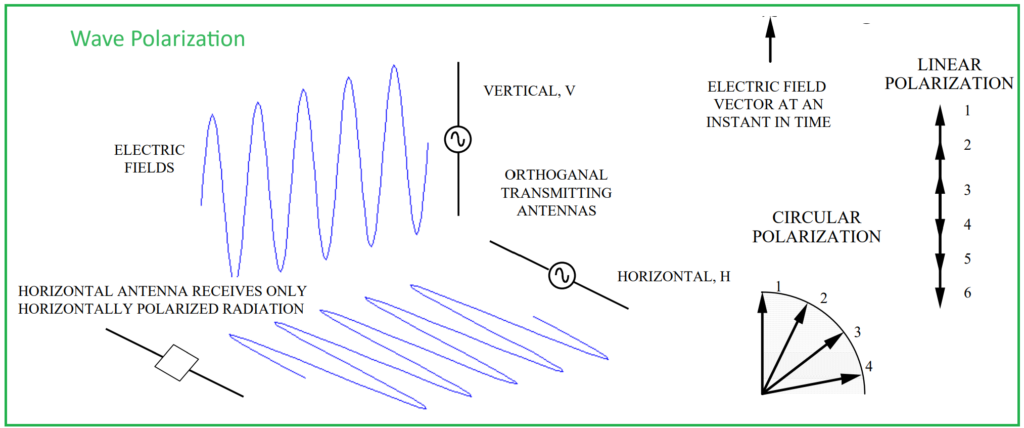
10. Wave Polarization in Radar System.
The polarization of an electromagnetic wave refers to the orientation of the electric field vector as it varies with time at a particular point in space. It describes the shape of the curve traced by the tip of the electric field vector over time.
In microwave systems, polarization is often designed to be either linear or circular. Linear polarization means that the electric field oscillates along a straight line, while circular polarization involves the electric field vector rotating in a circular manner as the wave propagates.
Circular polarization can be generated by using two orthogonal linearly polarized antennas, which effectively produce a rotating electric field. This type of polarization has various applications in radar systems and wireless communication.
11. Antenna Parameters.
Gain refers to the measure of an antenna’s ability to focus electromagnetic energy in a specific direction compared to an ideal isotropic radiator, which radiates energy uniformly in all directions. The fundamental equation for gain is:
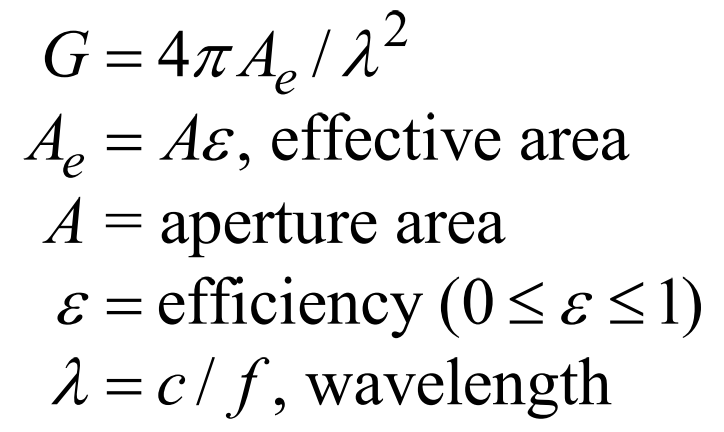
In general, an increase in gain is achieved by increasing the antenna’s size relative to the wavelength of the electromagnetic wave it is transmitting or receiving. This increase in size allows the antenna to concentrate more energy in the desired direction, resulting in a narrower beamwidth.
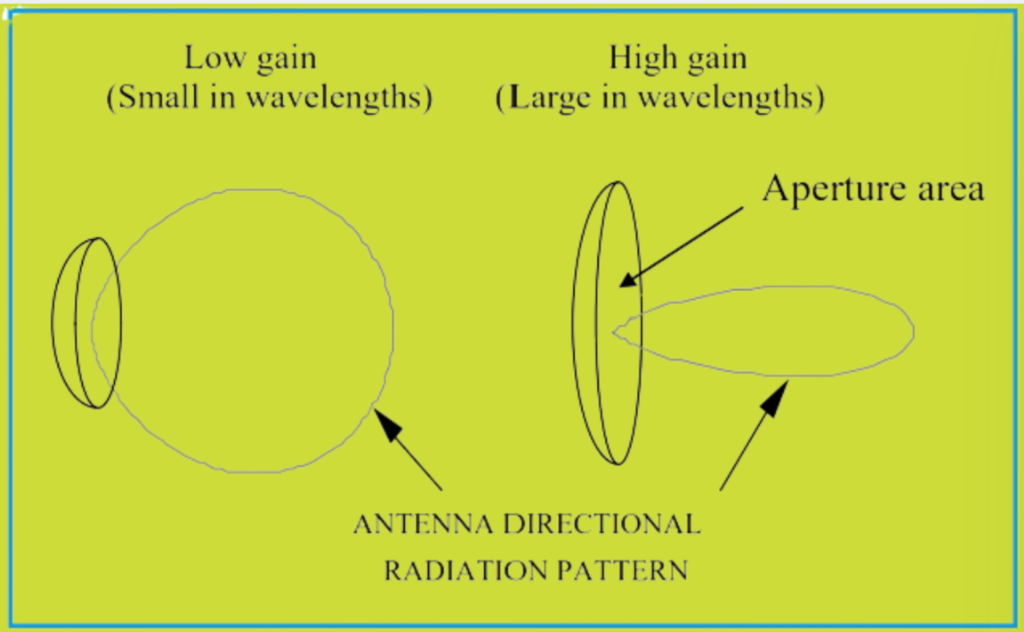
In radar applications, high gain and narrow beamwidths are desirable because they enable long detection and tracking ranges, as well as accurate direction measurement. A radar system with high gain can detect targets at greater distances and provide more precise information about their location and movement.
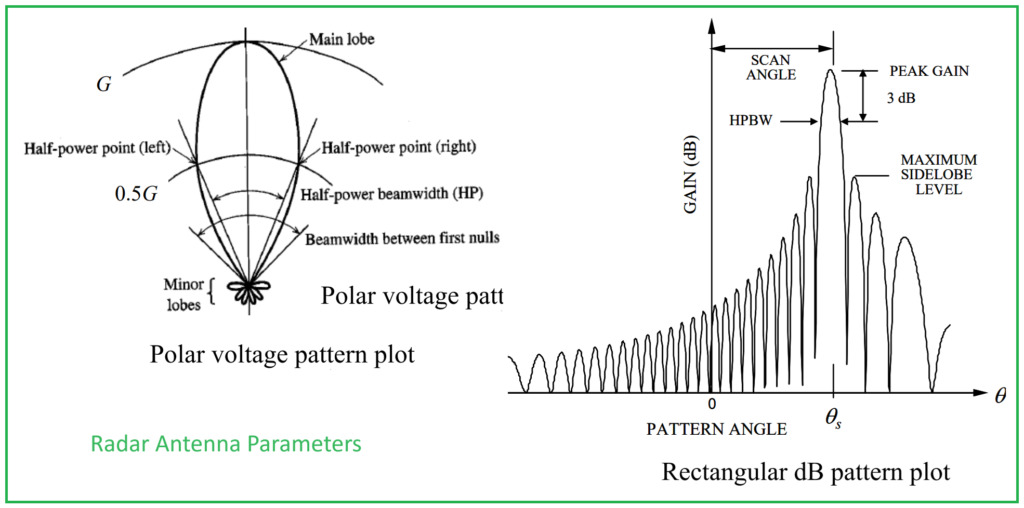
- Half Power Beamwidth (HPBW): HPBW refers to the angular width of the main lobe of the antenna radiation pattern where the power is half (-3 dB) of the maximum value. It characterizes the angular coverage of the antenna’s main radiation lobe.
- Polarization: Polarization describes the orientation of the electric field vector in an electromagnetic wave. Antennas can transmit or receive waves with different polarization states, such as linear, circular, or elliptical polarization. Matching polarization between transmitting and receiving antennas is often essential for efficient communication.
- Sidelobe Level: Sidelobe level refers to the level of radiation outside the main lobe of the antenna pattern. These sidelobes can cause interference and reduce the radar’s ability to distinguish between targets. Lower sidelobe levels are desirable for radar systems to minimize interference and increase target detection accuracy.
- Antenna Noise Temperature (TA): Antenna noise temperature is a measure of the noise generated by an antenna. It represents the equivalent temperature of a resistor that would produce the same amount of thermal noise as the antenna. Lower noise temperatures indicate better antenna performance, as they result in reduced system noise and improved signal-to-noise ratio.
- Operating Bandwidth: Operating bandwidth refers to the range of frequencies over which an antenna or radar system operates effectively. It encompasses the frequencies within which the antenna’s performance meets specified criteria, such as gain, impedance matching, and radiation pattern characteristics.
- Radar Cross Section (RCS) and Other Signatures: Radar cross-section (RCS) is a measure of how detectable an object is by radar. It quantifies the amount of electromagnetic radiation scattered back towards the radar transmitter by a target. Other signatures may include acoustic, thermal, or optical characteristics that can be exploited for target detection, classification, and identification.
12. Radar Antenna Tradeoffs.
In airborne applications, radar antennas face specific challenges and considerations due to the dynamic and often constrained nature of the platform. Here are some key factors to consider:
- Size, Weight, and Power (SWaP): Airborne radar antennas must be compact, lightweight, and have low power consumption to minimize the impact on the aircraft’s performance and fuel efficiency.
- Power Handling: Antennas need to withstand the power levels generated by the radar transmitter while maintaining reliability and efficiency.
- Location and Field of View: The antenna’s placement on the aircraft and its field of view must be carefully chosen to provide optimal coverage without interfering with other onboard systems or compromising aerodynamics.
- Frequency Spectrum: Airborne radar systems often operate over a wide frequency spectrum to support various mission requirements. Antennas must be capable of efficient operation across these frequencies while minimizing interference between different systems.
- Isolation and Interference: To ensure accurate and reliable operation, antennas must be isolated from other onboard electronics and systems to minimize interference and maintain signal integrity.
- Reliability and Maintainability: Airborne antennas must be rugged and reliable to withstand the harsh operating conditions encountered during flight. Additionally, ease of maintenance is essential for quick repairs and minimal downtime.
- Radomes: Antenna enclosures or covers (radomes) protect the antenna from aerodynamic forces, environmental factors, and electromagnetic interference. Designing radomes requires careful consideration of material properties, impact on antenna performance, and aerodynamic effects.
- Multi-Mission Capability: To maximize aircraft versatility, antennas should accommodate multiple systems (multi-mission, multi-band) to avoid operational restrictions and adapt to different mission profiles.
- Signature Control: Antennas play a role in managing various signatures, including radar cross-section (RCS), infrared (IR), acoustic, and visible signatures, to enhance stealth and survivability.
- New Technologies: Advancements in antenna architectures and technologies, such as conformal and integrated designs, digital “smart” antennas with multiple beams, and broadband capabilities, offer opportunities to improve performance, flexibility, and efficiency in airborne radar systems.
13. Radar Range Equation.
14. Minimum Detection Range.
The minimum detection range of a radar system refers to the closest distance at which the radar can reliably detect and track a target.
The maximum detection range Rmax of a radar system can be determined based on the minimum detectable signal (MDS) Pmin using the radar equation. The radar equation relates the received power to various system parameters and the range to the target. It can be expressed as:
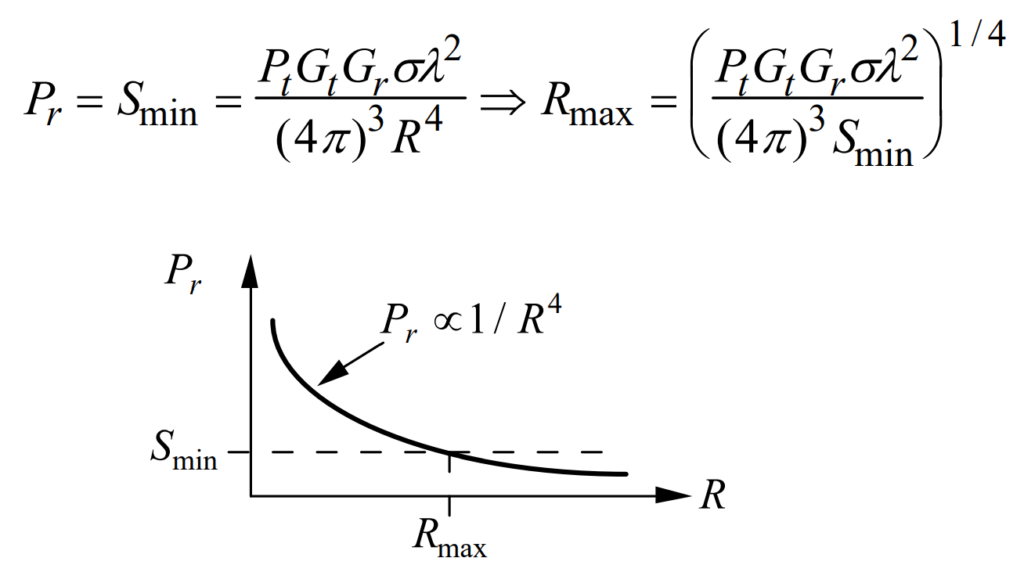
Where:
- is the received power at the radar receiver, is the transmitted power, is the antenna gain, is the radar cross-section of the target, is the wavelength of the radar signal, and is the range to the target.
15. Radar Block Diagram.
A radar block diagram typically consists of several key components that work together to detect and track targets. Here’s a radar block diagram:
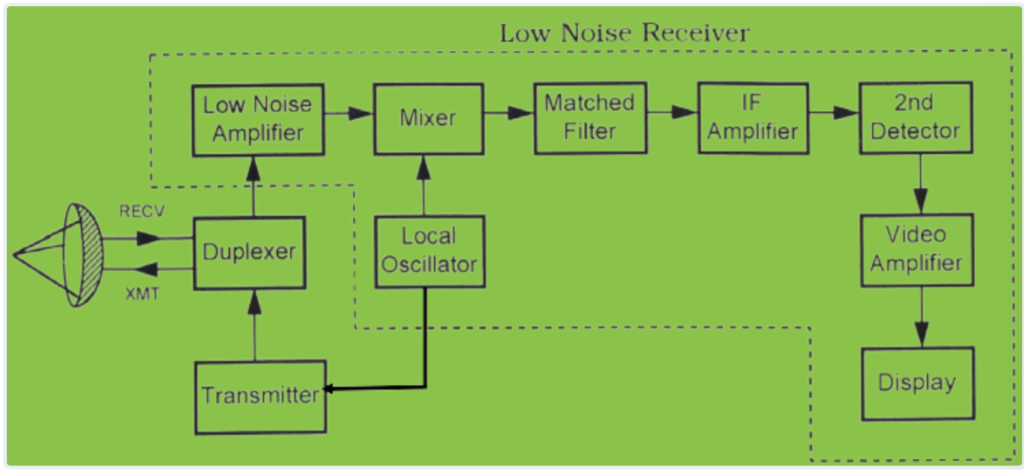
- Transmitter (Tx): The transmitter generates electromagnetic signals, typically in the microwave frequency range, and amplifies them to a level suitable for transmission.
- Antenna: The antenna radiates the transmitted signals into space in a specific direction. It also receives the signals reflected from targets.
- Duplexer: The duplexer is a device that allows the antenna to be used for both transmitting and receiving. It ensures that the high-power transmitted signals do not damage the sensitive receiver components.
- Receiver (Rx): The receiver amplifies and processes the weak signals received by the antenna. It includes components such as low-noise amplifiers, mixers, filters, and detectors.
- Signal Processor: The signal processor analyzes the received signals to extract information about the detected targets. This may involve techniques such as pulse compression, Doppler processing, and target tracking algorithms.
- Display: The display presents the processed radar information to the user in a human-readable format. This could be a radar screen showing the positions of detected targets, their velocities, and other relevant data.
- Control Interface: The control interface allows the radar operator to configure and control various parameters of the radar system, such as operating frequency, transmit power, and scanning patterns.
In coherent radar systems, the receiver is often implemented as a superheterodyne receiver. This type of receiver employs an intermediate frequency (IF) amplifier as part of its signal processing chain. The purpose of the IF amplifier is to filter and amplify the received signal before further processing.
One notable characteristic of coherent radar systems is that they use the same local oscillator reference for both transmission and reception. This coherence between the transmitted and received signals allows for various advanced signal processing techniques, such as coherent pulse integration and Doppler processing, which can enhance the radar’s performance in terms of range resolution, target detection, and tracking accuracy.
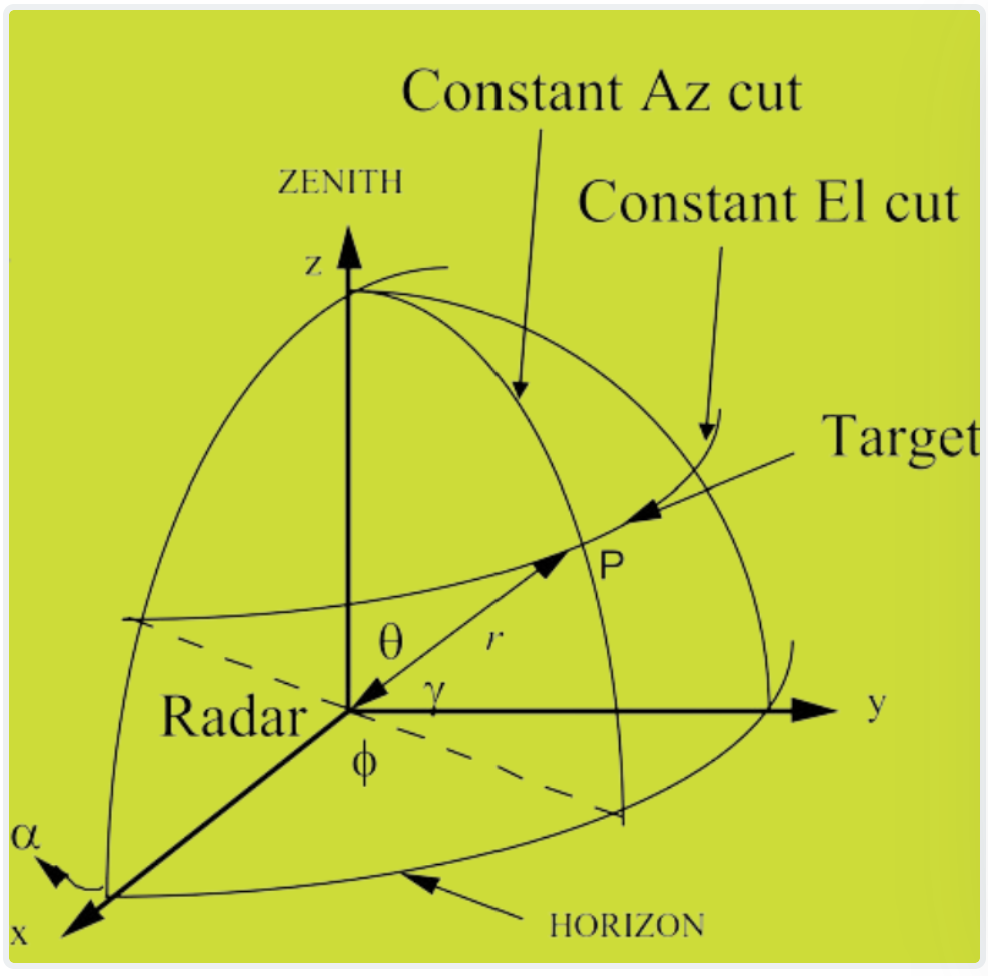
16. Radar Coordinate Systems.
Radar systems commonly utilize two main coordinate systems:
- Spherical Polar Coordinates: (r, θ, φ)
- r: Radial distance from the radar (range)
- θ: Elevation angle measured from the horizontal plane
- φ: Azimuth angle measured from a reference direction (typically clockwise from the north)
- Azimuth/Elevation Coordinates: (Az, El)
- Az: Azimuth angle, often measured clockwise from a reference direction (such as north)
- El: Elevation angle, measured above the horizontal plane
In these coordinate systems:
- The radar is positioned at the origin (0, 0, 0) of the coordinate system.
- The Earth’s surface typically lies in the x-y plane.
- Azimuth angles (α) are usually measured clockwise from a reference direction (e.g., north), while the spherical system’s azimuth angle (φ) is measured counterclockwise from the x-axis.
- There is a relationship between azimuth (α) and spherical azimuth angle (φ):
γ = 90−θ and α = 360 − φ
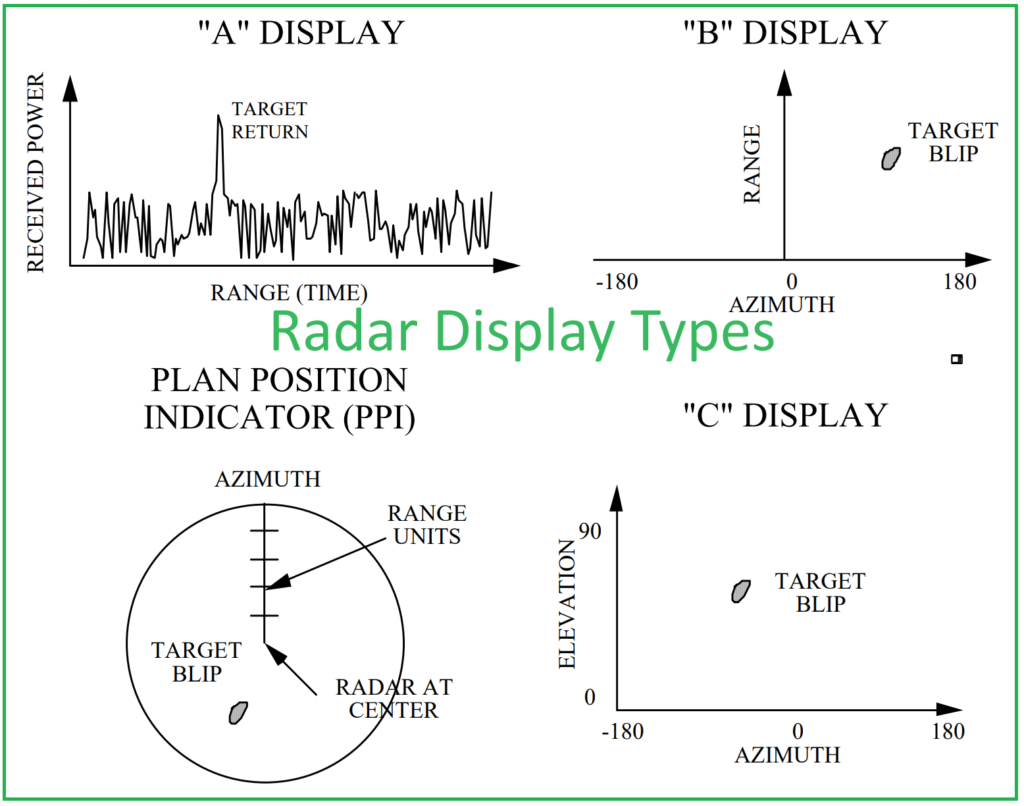
17. Radar Display Types.
18. Pulsed Waveform.
In radar systems, the pulsed waveform is commonly used, where multiple pulses are transmitted for various purposes:
- Covering Search Patterns: Transmitting pulses in specific patterns to scan and search designated areas efficiently.
- Tracking Moving Targets: Continuous transmission of pulses to track and monitor the movements of targets over time.
- Integration of Target Returns: Summing up the returns from multiple pulses to enhance the detection of targets, especially in noisy environments or for weak signals.
The pulse train, a series of pulses, is a typical waveform used in radar systems. Its key parameters include:
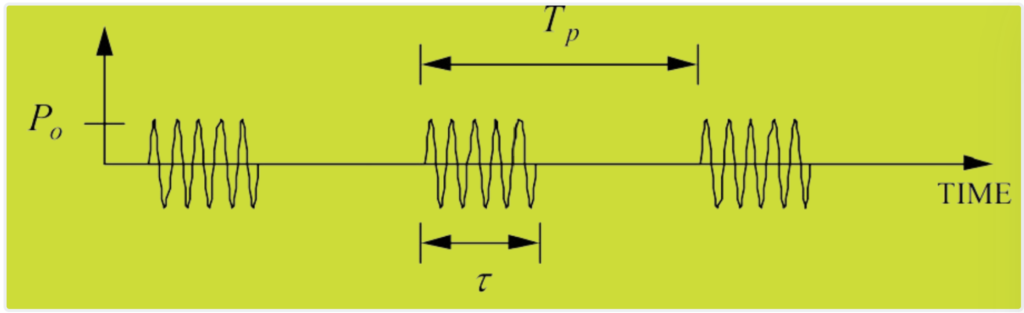
- Peak Instantaneous Power (P1): The maximum power level of each transmitted pulse, measured in watts (W).
- Pulse Width (τ): The duration of each pulse, measured in seconds (sec). It determines the temporal extent of the transmitted signal.
- Pulse Repetition Frequency (PRF): The rate at which pulses are transmitted, expressed in Hertz (Hz). It is the inverse of the pulse repetition period (Tp).
- Interpulse Period (TP): The time interval between the end of one pulse and the start of the next pulse, measured in seconds (sec).
- Number of Pulses (N): The total count of pulses transmitted within a specified time frame or observation period.
19. Range Ambiguities in Radar System.
Range ambiguities can arise when multiple pulses are transmitted in radar systems. To ensure unambiguous range determination, the pulse repetition frequency (PRF) must satisfy certain conditions. Specifically, the unambiguous range Runambiguous is given by the equation:
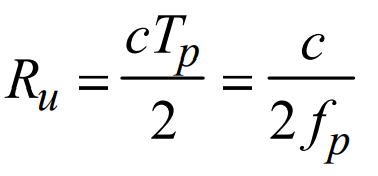
and TP ≥ 2R/c
where:
- c is the speed of light,
- τ is the pulse width.
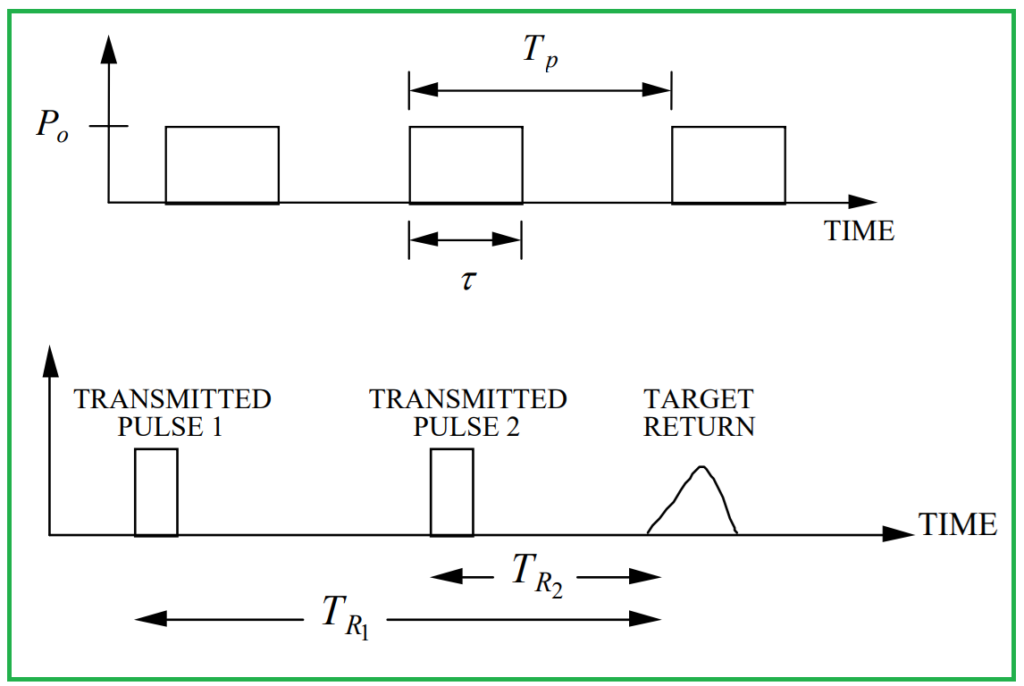
To avoid range ambiguities, the PRF must be such that the maximum range that can be detected within one pulse repetition period (TP) does not exceed Runambiguous. This ensures that the returns from subsequent pulses do not overlap with the returns from previous pulses, allowing for accurate range measurements.
20. Range Resolution.
Range resolution in radar refers to the ability to distinguish between two targets that are located at different distances from the radar transmitter and receiver. It is determined by the duration of the transmitted radar pulse.
he range resolution, denoted as ΔR, represents the minimum distance required between two targets for them to be resolved as separate objects by the radar system. It’s calculated as half the pulse duration (τ) times the speed of light (c), as shown in the equation:
ΔR=R2-R1 = c⋅τ / 2
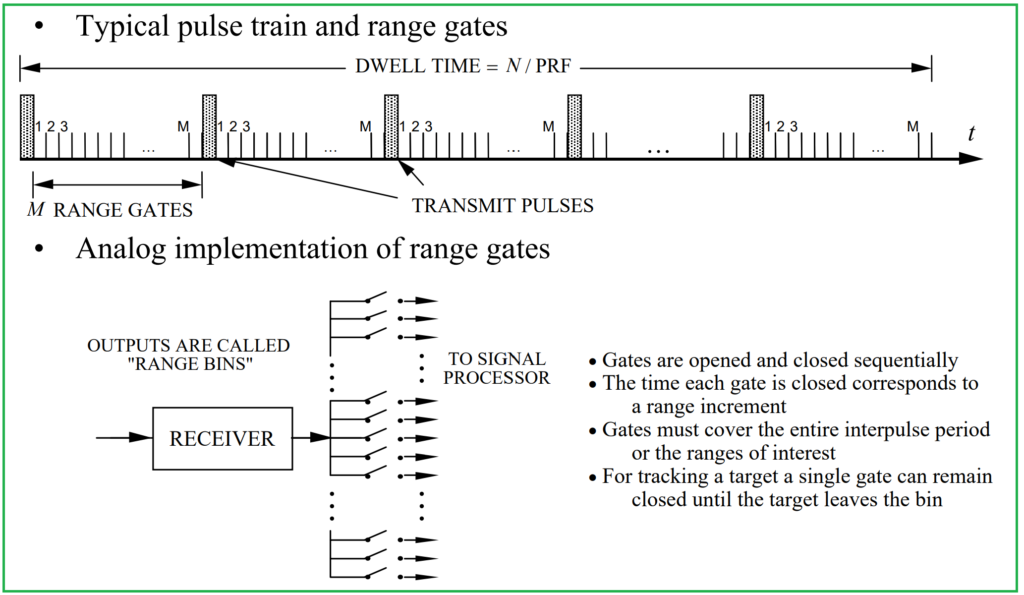
21. Range Gates.
Range gates are specific segments of the radar’s range that are selected for analysis. In radar systems, the range to a target is divided into discrete intervals known as range bins or range gates. Each range gate corresponds to a specific distance from the radar transmitter.
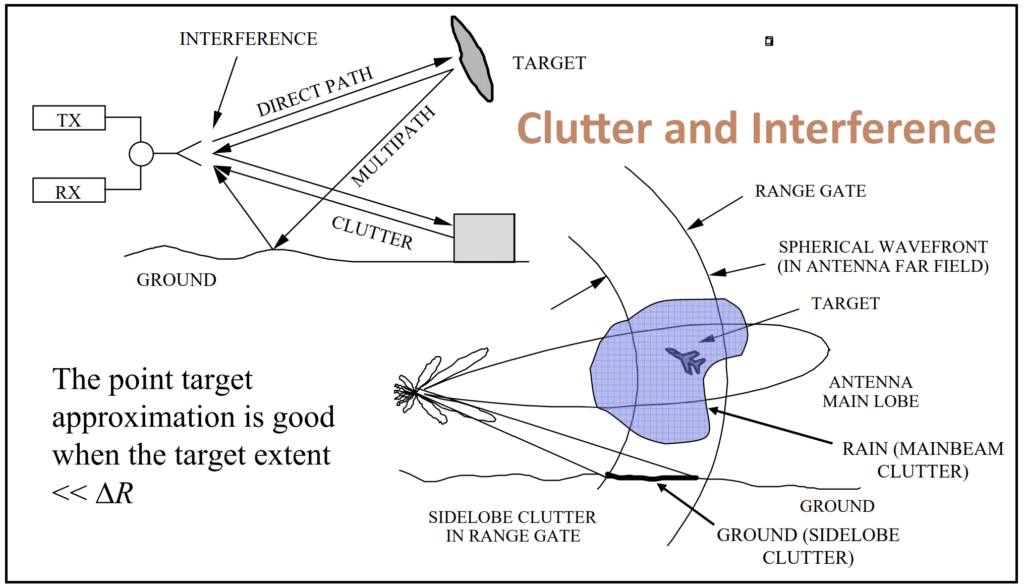
22. Clutter and Interference.
Clutter and interference are two common challenges in radar signal processing:
Clutter refers to unwanted signals that originate from sources other than the targets of interest. These signals can arise from various sources such as terrain features, buildings, vegetation, precipitation, sea waves, and man-made objects.
Interference refers to unwanted signals that come from external sources and can affect the radar’s operation. Sources of interference include intentional or unintentional radio frequency (RF) emissions, electromagnetic interference (EMI), electronic countermeasures (ECM), and jamming.
Read Also: What is Signal-to-Noise Ratio (SNR) in Radar System?
23. Integration of Pulses.
Integration of pulses in radar signal processing involves combining multiple received pulses to enhance the signal-to-noise ratio (SNR) and improve detection performance. There are two main methods of integration: noncoherent integration and coherent integration.
Noncoherent Integration (Post detection Integration):
- Noncoherent integration occurs after the envelope detector.
- The magnitudes of the returns from all pulses are added together.
- SNR increases approximately as the square root of the number of pulses (SNR ∝ √N).
- This method does not require phase information and is simpler to implement.
- It provides moderate SNR improvement and is effective for improving detection in low SNR conditions.
Coherent Integration (Pre detection Integration):
- Coherent integration occurs before the envelope detector, requiring phase information to be preserved.
- Coherent pulses must be transmitted to maintain phase coherence.
- SNR increases linearly with the number of pulses (SNR ∝ N).
- Coherent integration offers greater SNR improvement compared to noncoherent integration.
- It requires more complex signal processing and hardware to maintain phase coherence.
- Coherent integration is beneficial for maximizing SNR in situations where precise phase information is available and maintained.
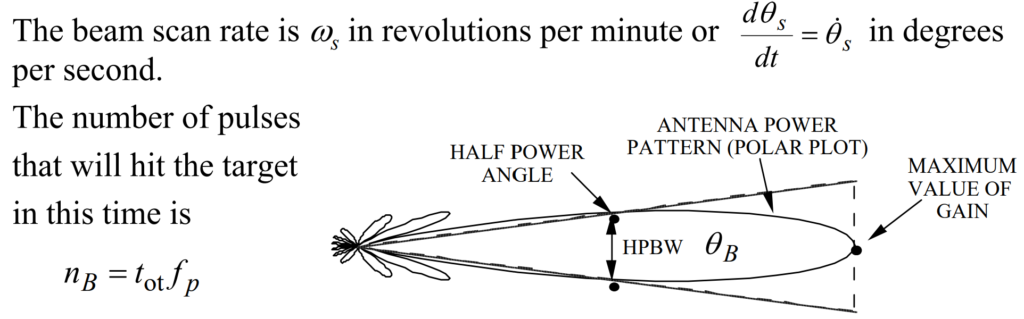
24. Dwell Time.
Dwell time, also known as look time or time on target, refers to the duration during which a radar beam illuminates a specific target. In a simple antenna model with uniform illumination within the half power beamwidth (HPBW) and zero gain outside, the dwell time (tot) for a target can be calculated as follows:
tot = θb/θs
Read Also: What is Doppler Shift in Radar System?
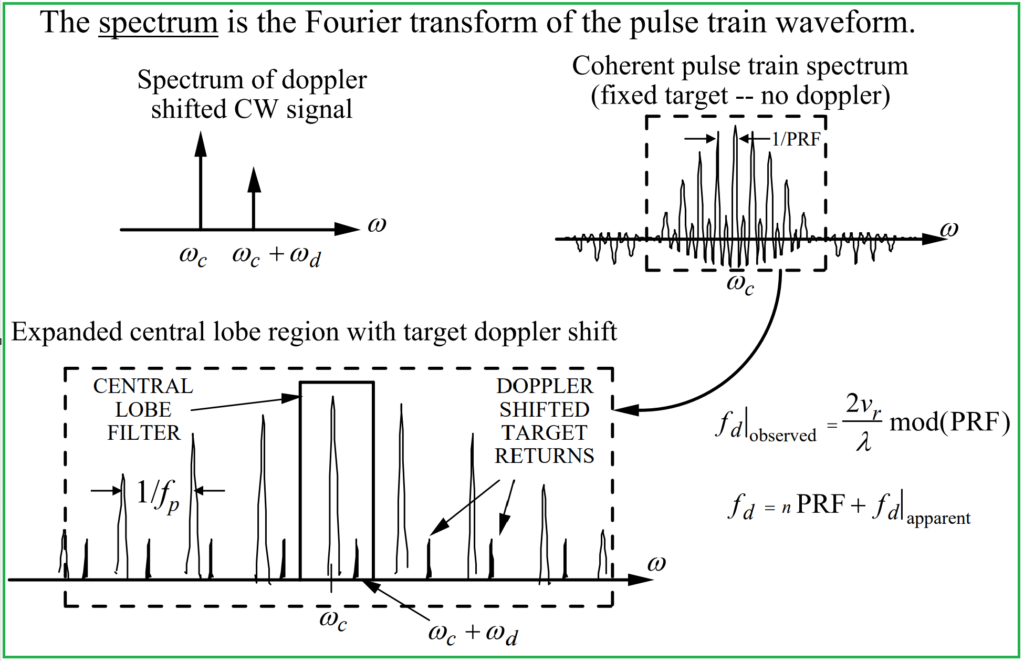
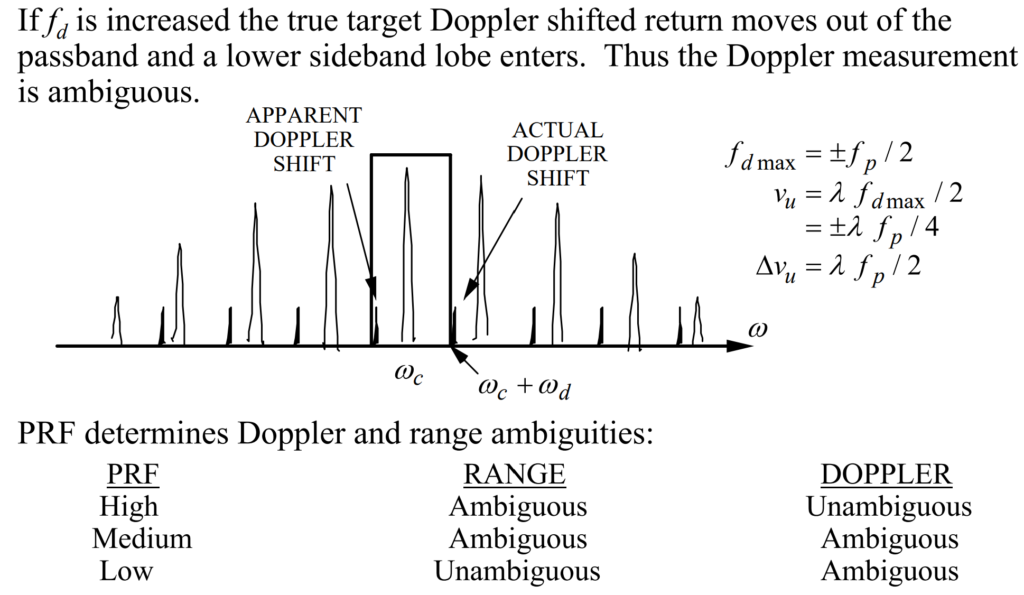
25. Velocity Ambiguities.
Velocity ambiguity refers to the phenomenon where a radar system is unable to accurately determine the true velocity of a target due to limitations in the pulse repetition frequency (PRF) and the maximum unambiguous velocity (Vmax) that the radar can measure.
26. Low, High, Medium PRF.
Pulse repetition frequency (PRF) in radar system is classified into low, medium, and high categories, each serving specific purposes. Low PRF is employed for long-range surveillance due to its longer pulse intervals, allowing echoes to return from distant targets before the next pulse is transmitted. Medium PRF strikes a balance between range and velocity resolution and is commonly used for general-purpose applications. High PRF is utilized for short-range detection or fast-moving targets, enabling rapid pulse transmission and reception, ideal for close-range tracking.
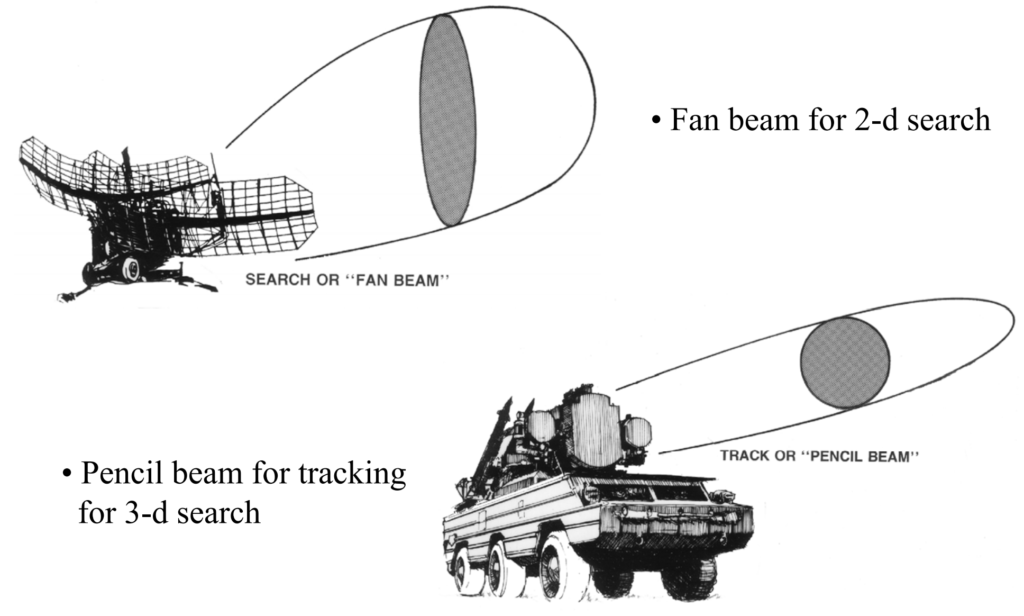
27. Track Versus Search
Search radars are designed for wide-ranging coverage, operating across long, medium, and short ranges (typically 20 km to 2000 km). They utilize high power density to detect distant targets, employing high peak power, long pulses, and extended pulse trains, often with high antenna gain. These radars typically employ low pulse repetition frequencies (PRFs) and large range bins. They offer search options, including rapid search rates with narrow beams or slower search rates with wider beams.
On the other hand, tracking radars prioritize accurate angle and range measurements while minimizing time spent on targets for swift processing. They utilize specialized tracking techniques such as monopulse, conical scan, and beam switching to achieve precise tracking capabilities.
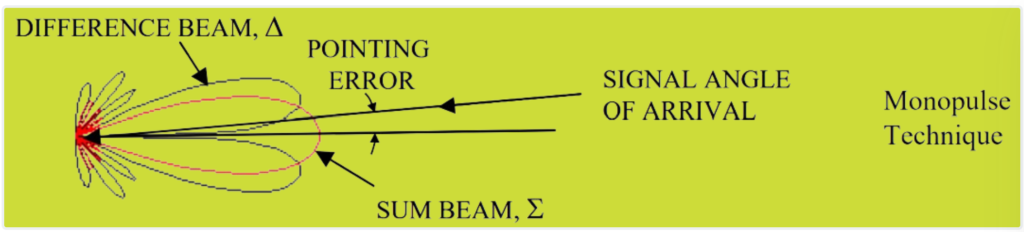
28. Antenna Patterns.
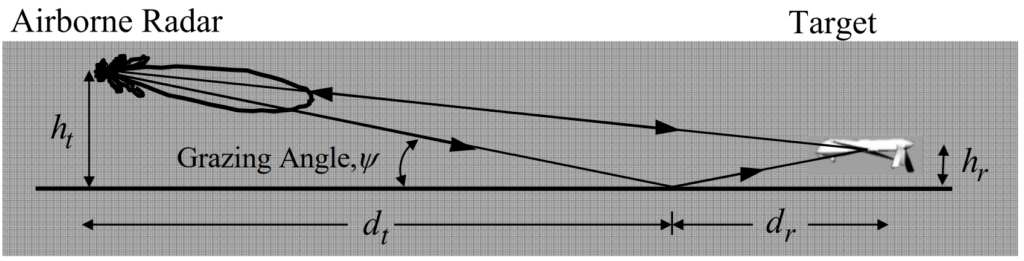
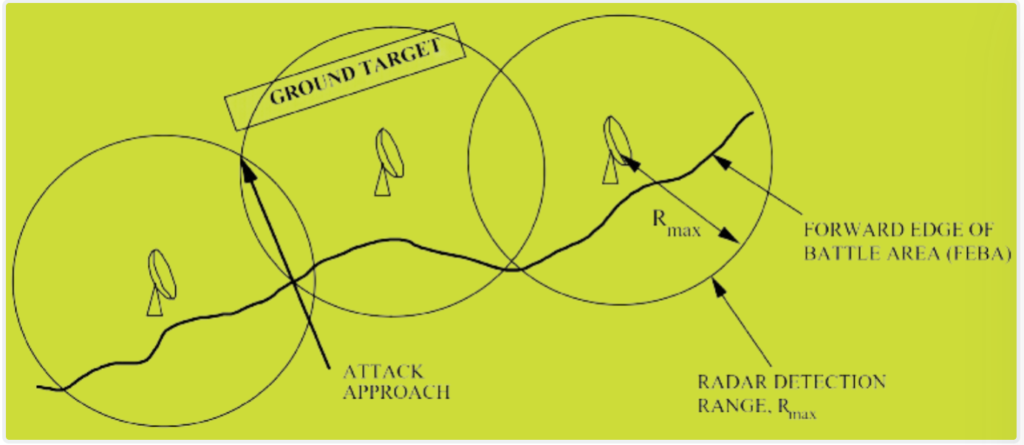
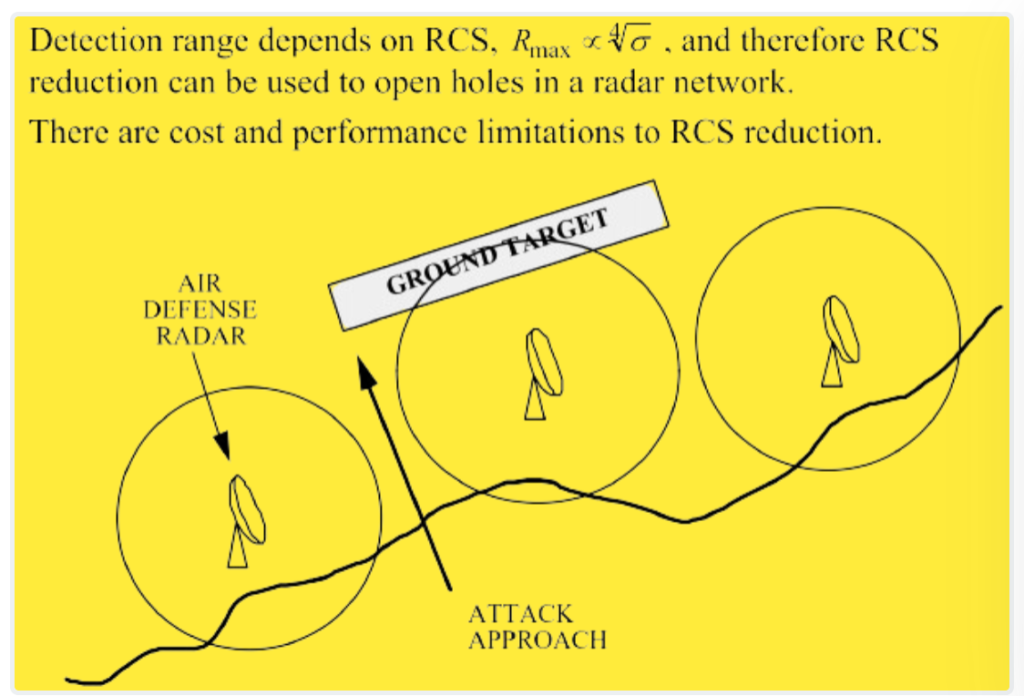
29. Attack Approach.
The attack approach involves organizing a network of radars to ensure continuous coverage of a ground target. This network is strategically arranged to detect any conventional aircraft attempting to penetrate the radar coverage. As a result, conventional aircraft face significant challenges in bypassing the radar network undetected.
Read Also: What is Radar Jamming?
30. Low Observability.
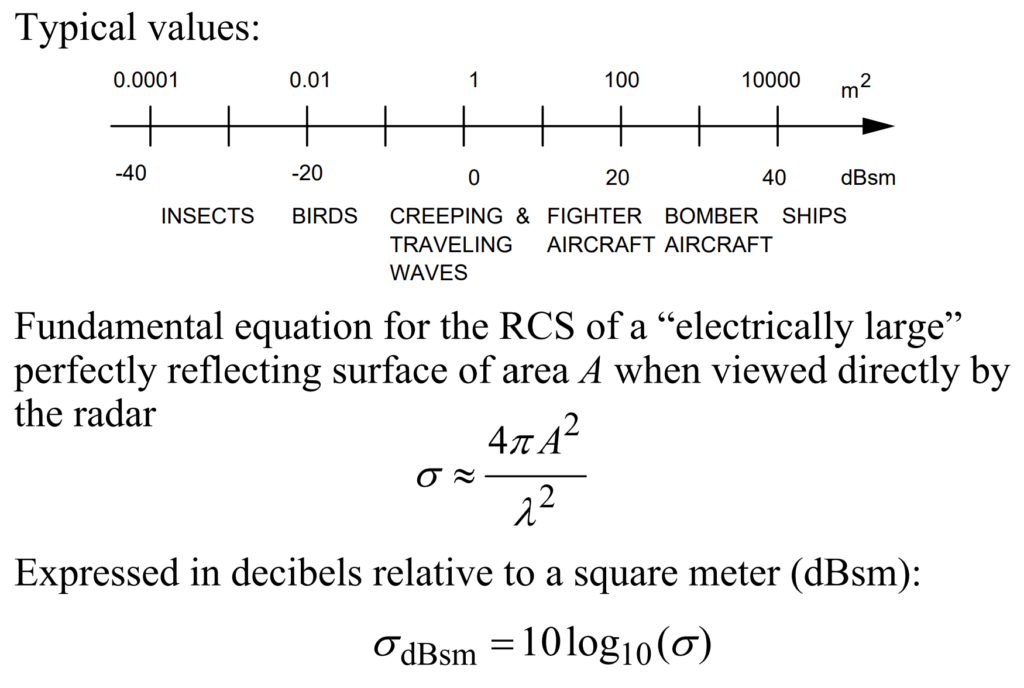
31. Radar Cross Section (RCS).
Radar Cross Section (RCS) refers to the measure of a target’s ability to reflect radar signals in the direction of the radar receiver. It quantifies the strength of the radar return signal from the target and is a crucial parameter in radar detection, tracking, and identification.
Essentially, RCS indicates how detectable an object is by radar systems. It depends on various factors such as the object’s size, shape, material composition, orientation, and surface properties. Larger objects, objects with complex shapes, and those with highly reflective surfaces tend to have larger RCS values, making them more easily detectable by radar.
32. RCS Target Types.
Radar Cross Section (RCS) varies depending on the type of target being observed.
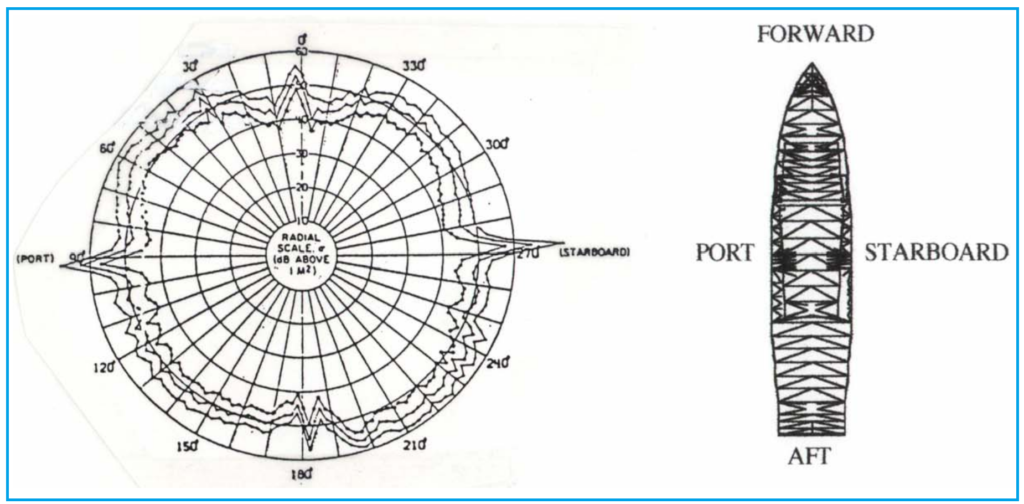
A few dominant scatterers (e.g., hull) and many smaller independent scatterers:
- This scenario is typical for objects like ships, where there are prominent reflective surfaces (such as the hull) that contribute significantly to the overall RCS. Additionally, smaller features like masts, antennas, and superstructures may also contribute, albeit to a lesser extent.
- The RCS value provided (maximum RCS = 70 dBsm) likely represents the peak RCS observed from the target in the specified conditions, such as a specific aspect angle, frequency (S-Band at 2800 MHz), and polarization (horizontal).
- The dominant scatterers, such as the hull, contribute most significantly to the overall RCS, while the many smaller scatterers add complexity and variability to the radar return.
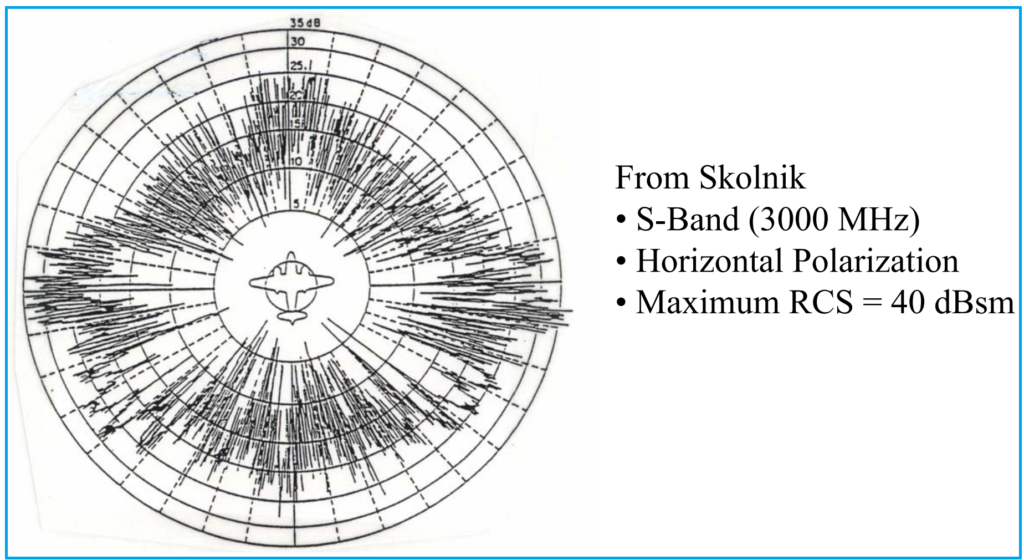
Many independent random scatterers, none of which dominate (e.g., large aircraft):
- This scenario is characteristic of targets like large aircraft, where there are numerous smaller scatterers distributed across the surface, but no single dominant reflective feature.
- The RCS of such targets tends to be more evenly distributed across the surface, with contributions from various components such as the fuselage, wings, engines, and protruding structures.
- In contrast to the first scenario, where specific features dominate the RCS, in this case, the RCS arises from the collective contributions of many smaller scatterers, resulting in a more uniform radar return.
- The RCS value for large aircraft can vary widely depending on factors such as aircraft geometry, surface materials, and radar cross section reduction measures implemented (e.g., stealth coatings, shaping techniques).
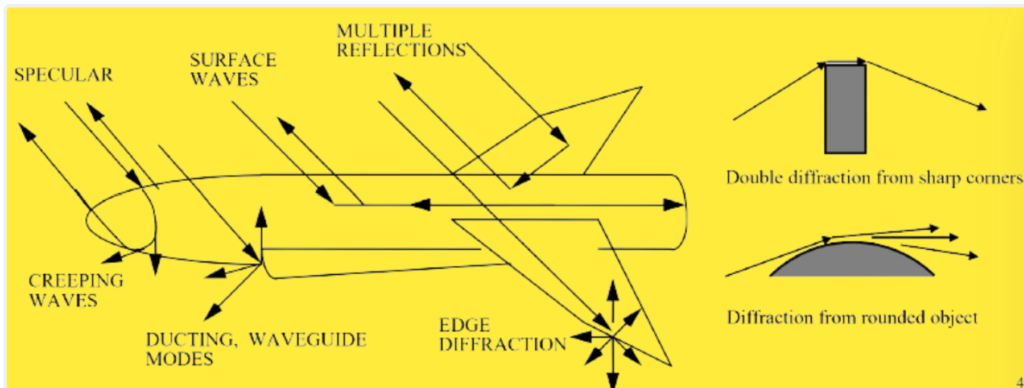
33. Scattering Mechanisms
Scattering mechanisms are essential for understanding wave behavior, particularly at radar frequencies:
- Specular Reflections: Specular reflections occur when waves bounce off a surface at an angle that satisfies Snell’s law, resulting in “mirror-like” reflections. These reflections are highly directional and predictable, making them crucial for radar applications.
- Surface Waves: Surface waves occur when the surface of an object behaves like a transmission line, allowing waves to propagate along it. These waves can interact with radar signals, affecting their propagation characteristics and contributing to the overall radar signature of the object.
- Diffraction: Diffraction refers to the bending and spreading of waves as they encounter abrupt discontinuities or obstacles. In radar applications, diffraction can cause scattered waves to propagate in various directions, contributing to the overall scattering pattern observed by the radar system.
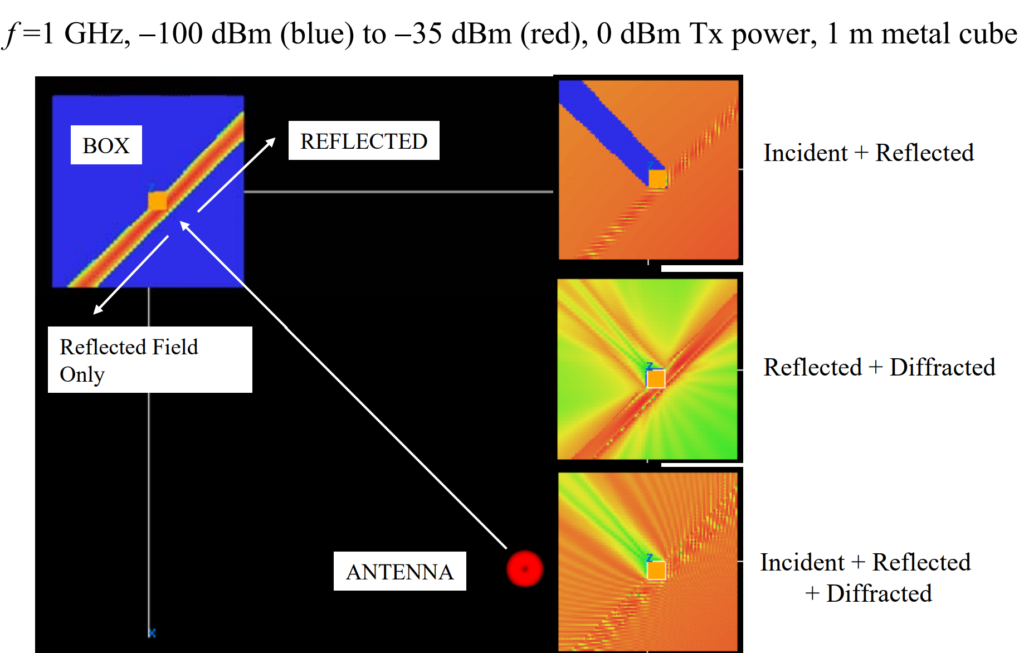
34. Example: Dipole and Box.
36. RCS Reduction Methods.
In shaping to mitigate radar detection, engineers often tilt surfaces and align edges to minimize reflective surfaces that could bounce radar signals back to the source. Additionally, avoiding sharp corners reduces the likelihood of creating corner reflectors, which can significantly enhance radar cross-section (RCS).
Materials play a crucial role in RCS reduction strategies. Radar-absorbing layers or coatings can be applied to surfaces to attenuate or absorb incoming radar signals, reducing their reflection back to the radar source.
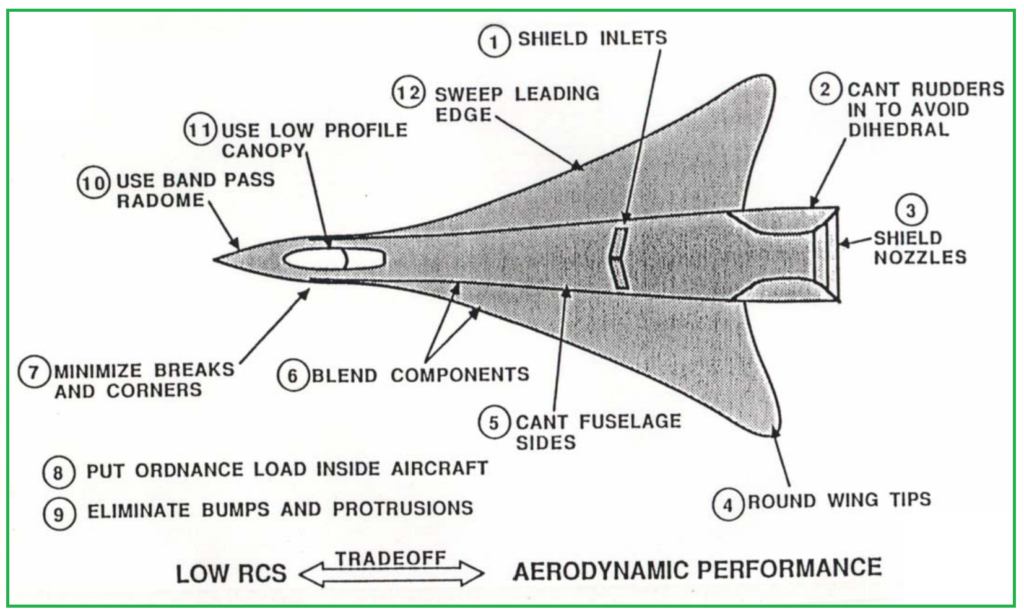
Cancellation techniques involve introducing secondary scatterers strategically to counteract the radar return from the primary target. By carefully engineering the secondary scatterers’ properties, such as size, shape, and material, it’s possible to minimize the overall radar signature effectively.
37. SCR-270 Air Search Radar.

