Aircraft stability and control are fundamental principles governing the behavior and maneuverability of aircraft during flight. Stability refers to the aircraft’s ability to maintain its intended flight path and attitude, while control involves the pilot’s ability to maneuver the aircraft as desired. Both stability and control are very important for safe and efficient flight operations.
What is Aircraft Stability?
In the aircraft dynamics and stability, equilibrium refers to a state where the aircraft remains in a balanced condition, with its motion either constant or uniform. For an aircraft, this equilibrium often involves uniform motion with null angular velocities, resulting in a straight and level flight path, akin to a translation through the air.
Stability, on the other hand, is a fundamental property that characterizes how an aircraft responds to disturbances or variations from its equilibrium state. When any of the variables describing the aircraft’s equilibrium, such as pitch, roll, yaw, or velocity, experiences a change or perturbation, stability determines the aircraft’s subsequent behavior.
For example, if an aircraft encounters a sudden wind gust that causes it to deviate from its desired flight path, stability dictates whether the aircraft returns to its original state of equilibrium or continues to diverge further from it. A stable aircraft will tend to dampen out the effects of the disturbance and return to its trimmed state, maintaining controllability and predictability. In contrast, an unstable aircraft may exhibit oscillatory or divergent behavior, making it difficult for the pilot to maintain control.
Types of Aircraft Stability
Static stability and dynamic stability are two fundamental concepts used to analyze the stability of an aircraft in response to disturbances or perturbations. Each addresses different aspects of the aircraft’s behavior in relation to its equilibrium state, but both are essential for ensuring safe and controllable flight.
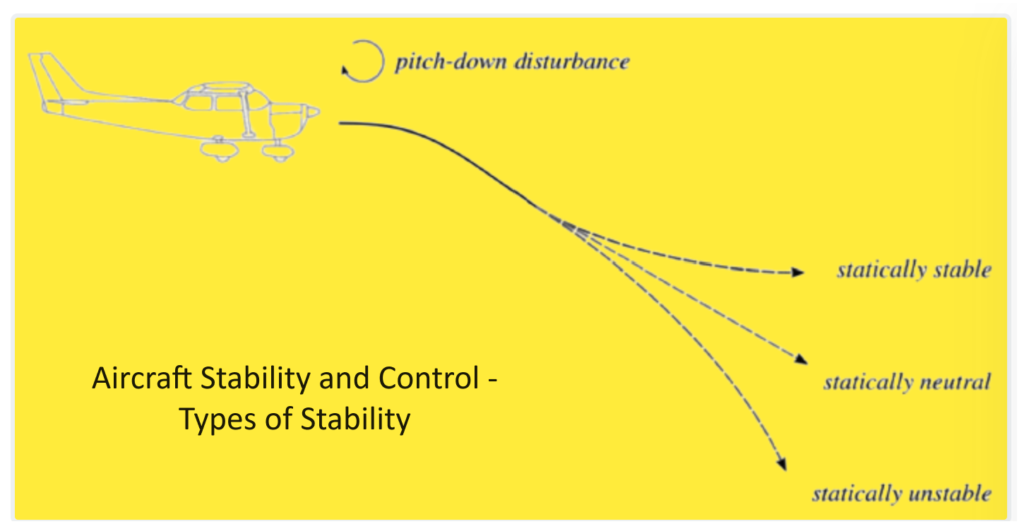
1. Static Stability:
Static stability focuses on the immediate response of the aircraft to a disturbance, typically analyzed right after the perturbation occurs. It involves studying the forces and torques that act on the aircraft immediately after the disturbance to assess whether the equilibrium state tends to be restored or further deviated from. Specifically, static stability examines how the state variables describing the equilibrium, such as pitch, roll, and yaw angles, respond to the disturbance. If these variables tend to amplify or increase after the perturbation, the equilibrium state is considered statically unstable. Conversely, if they tend to return to their original values, the equilibrium state is statically stable.
2. Dynamic Stability
Dynamic stability, on the other hand, considers the longer-term evolution of the aircraft’s variables following a disturbance. It involves studying how the various flight parameters, including pitch, roll, and yaw angles, as well as velocity and altitude, change over time after the equilibrium is perturbed. Dynamic stability requires solving the system of equations that describe the six degrees of freedom (6DOF) movement of the aircraft.
A dynamically stable aircraft is one in which the variables describing its movement tend to converge to a stationary value over time, either returning to the original equilibrium or settling into a new one. Conversely, a dynamically unstable aircraft fails to reach a stable equilibrium and may exhibit oscillatory or divergent behavior.
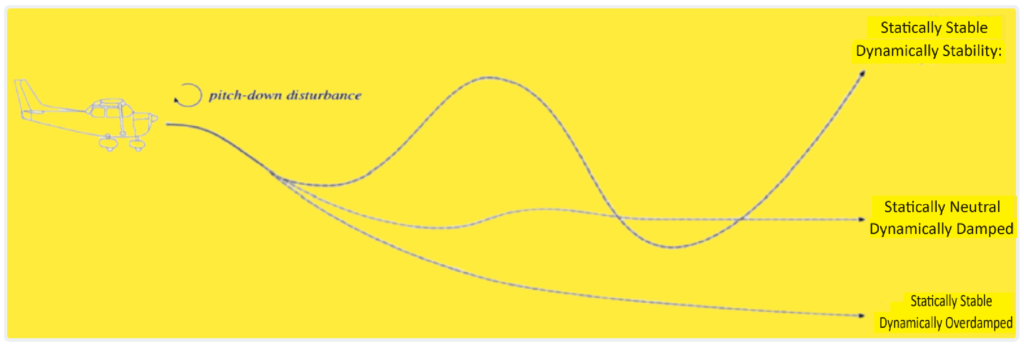
- The three main cases for aircraft pitch dynamic stability are illustrated:
- Dynamically unstable: The pitch angle oscillates and diverges over time, indicating instability.
- Dynamically damped: The pitch angle oscillates but gradually converges to the equilibrium value, indicating stability with damping.
- Dynamically overdamped: The pitch angle returns to the equilibrium value without oscillation, indicating stability with strong damping.
| Case | Description |
|---|---|
| Dynamically unstable | After a pitch disturbance, the aircraft’s pitch angle oscillates and diverges over time, indicating instability. |
| Dynamically damped | Following a pitch disturbance, the pitch angle oscillates but gradually converges to the equilibrium value, indicating stability with damping. |
| Dynamically overdamped | After a pitch disturbance, the pitch angle returns to the equilibrium value without oscillation, indicating stability with strong damping. |
In summary, static stability assesses the immediate response of the aircraft to a disturbance, while dynamic stability considers the longer-term evolution of the aircraft’s variables following the disturbance. Both forms of stability are critical for evaluating the overall stability characteristics of an aircraft and ensuring its safe and predictable flight behavior.
What is Aircraft Control?
Aircraft control refers to the management and manipulation of an aircraft’s flight path, orientation, and velocity during various phases of flight. It involves the use of control surfaces, propulsion systems, and other mechanisms to regulate the aircraft’s movement and maintain desired flight characteristics. Aircraft control is essential for achieving stable flight, maneuvering the aircraft, and ensuring safe operation under different conditions.
There are three primary axes along which aircraft control is managed:
- Longitudinal Axis: Controls movement around the lateral axis, affecting pitch. Pitch control is typically managed by the elevator control surface, which adjusts the aircraft’s angle of attack.
- Lateral Axis: Controls movement around the longitudinal axis, affecting roll. Roll control is typically managed by ailerons, which are located on the wings and control the aircraft’s banking motion.
- Vertical Axis: Controls movement around the vertical axis, affecting yaw. Yaw control is typically managed by the rudder, which is usually located on the tail of the aircraft and controls its left and right movement.
In addition to these primary controls, modern aircraft may also have secondary controls such as flaps, slats, spoilers, thrust reversers, and trim systems, which further enhance the aircraft’s performance and handling characteristics.
Aircraft Control Theory Explained
Control theory is an interdisciplinary field that spans engineering and mathematics, focusing on the behavior of dynamical systems. In this context, a dynamical system refers to any system whose state changes over time due to internal or external influences. These systems can range from simple mechanical systems to complex biological or economic systems.
In control theory, the external input to a system, often referred to as the reference signal, is the desired target or setpoint that one or more output variables of the system aim to follow or achieve over time. To achieve this, a controller manipulates the inputs to the system in order to influence the behavior of the outputs, ensuring they track the desired reference signal.
The primary objective of control theory is to devise strategies for the controller to take corrective action that maintains system stability. Stability implies that the system can maintain the reference state values without oscillating excessively around them or diverging uncontrollably. Essentially, stability ensures that the system behaves predictably and reliably over time.
The relationship between the input and output of a system is typically described by a mathematical function known as the transfer function. This function represents the system’s response to input signals in terms of spatial or temporal frequency domains. In particular, for linear time-invariant systems, the transfer function provides a concise representation of how the system transforms input signals into output signals.
By analyzing the transfer function and employing various control techniques and algorithms, control theorists design controllers that can effectively regulate system behavior, achieve desired performance criteria, and ensure stability under different operating conditions. Control theory finds applications in numerous fields, including aerospace, robotics, automotive systems, industrial processes, and more, where precise control of dynamic systems is essential for optimal performance and safety.
Aircraft Control Example
Consider an aircraft is autopilot system, let’s consider an example to understand control theory concepts. The autopilot’s function is to maintain the aircraft’s speed at a constant desired or reference speed set by the pilot. This scenario involves a controller, which is the autopilot itself, acting on the plant, which is the aircraft governed by its equations of motion. Together, the autopilot and the aircraft form the system. The output of this system is the aircraft’s speed, while the control action is adjusting the throttle position to regulate engine power.
Initially, let’s consider a simplistic open-loop control approach. When the pilot engages the autopilot, the throttle position is fixed based on the desired speed. However, without feedback from the system output (the aircraft’s actual speed), this control strategy cannot account for external factors such as wind. Consequently, in the presence of headwinds, the aircraft may slow down, while tailwinds may cause it to speed up. This inability to adapt to changing conditions characterizes open-loop control, where the control action remains unchanged regardless of the system’s response.
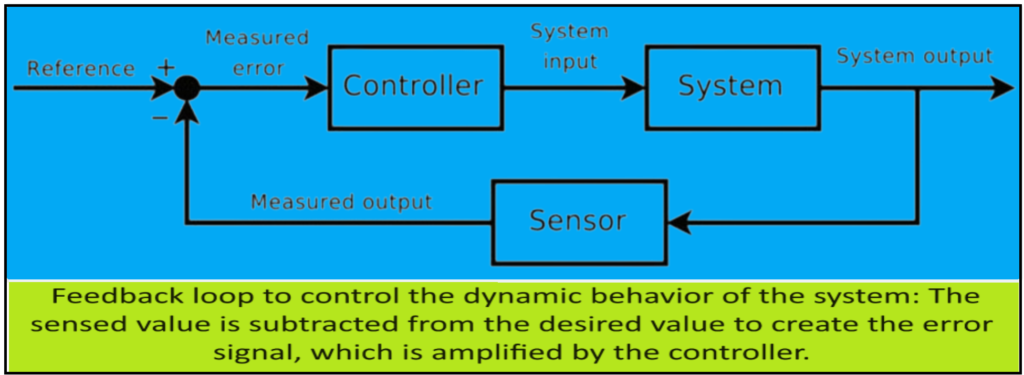
Alternatively, in a closed-loop control system, a sensor continuously monitors the aircraft’s speed, providing feedback to the controller. Upon detecting deviations from the desired speed, the controller adjusts the throttle position accordingly to maintain the target speed. For instance, if the aircraft slows down due to headwinds, the sensor detects this change, prompting the controller to increase engine power by adjusting the throttle position. This dynamic adjustment based on feedback allows the autopilot to compensate for external influences and maintain the desired speed.
The closed-loop control system operates based on a feedback loop paradigm. Here, the control action influences the system output, which is then measured and fed back to the controller to modify the control action as needed. This continuous feedback loop enables the system to respond adaptively to changes, ensuring that the output matches the desired reference value despite varying conditions.