This article is about Foundation Fieldbus Applications and focusing to the engineers, technicians and supervisors. You will find lot of documents related to this article. Just navigate our website www.paktechpoint.com and find more articles. Please! Do not forget to subscribe our You tube channel also. Thanks in Advance.
Foundation Fieldbus Applications
Fieldbus is both a Powerful Communications Protocol and an Enabling Technology.
Foundation Fieldbus-based Distributed Field Interfaces use the same function blocks as Fieldbus instruments. Only one software program is needed to configure every part of the system.
New Technology for Industry :
Most enterprises realise that recent developments in information and control technology, mathematical modelling, and advanced control algorithms are becoming available to the process industries. Most of these processes are characterised by highly complex, non-linear physicochemical phenomena. New technology approaches like adaptive control, advanced control strategies and fieldbus are being used to improve control and productivity performance.
Therefore production, quality, and safety gains are realised by obtaining more data from the field. Investments made on this area have produced paybacks in as little as six months in many cases.
Foundation Fieldbus-based Distributed Field Interfaces use the same function blocks as fieldbus instruments, the same PID block, the same AI block and so on. This means that only one software programme is needed to configure every part
of the system – transmitters, positioners and controllers – all in the same language. Thus the problem of linking Fieldbus blocks to proprietary languages is eliminated.
of the system – transmitters, positioners and controllers – all in the same language. Thus the problem of linking Fieldbus blocks to proprietary languages is eliminated.
FCS configuration software can put the PID block either in a transmitter, positioner, or controller by simply dragging and dropping. An analogue input looks the same if it is in a pressure transmitter or a 4-20 mA input module in the I/O subsystem. This makes the system easier to use because you only need to install one set of hardware and learn one software programme.
The real-life application examples on the following pages show how important fieldbus can be as a resource for
implementing advanced control strategies.
implementing advanced control strategies.
Fieldbus is both a powerful communications protocol and an enabling technology. It can interplay with advanced algorithms by providing much data about the variable measured, the transmitter and even calculations performed by fieldbus function blocks.
Today there are transmitters that can instantiate up to 17 different function blocks and can support up to 20
instantiations in a single transmitter. This shows that Fieldbus is a tested, used, and proven technology.
instantiations in a single transmitter. This shows that Fieldbus is a tested, used, and proven technology.
Fieldbus is an enabling technology that is changing – in fact revolutionizing – the way users design, install, configure, and operate control systems.

Applications Fieldbus:
Fieldbus offers a number of potential changes from current analogue signal transmission. These can be summarised as follows:
•The ability to connect multiple field devices to a single bus segment;
•The ability to transmit diagnostic information from the field device to a central host system; and
•The ability to migrate control algorithms from a central host system into the field devices.
Fieldbus technology consists of
1.The physical layer,
2.The communication “stack,” and
3.The user application.
The standard user application is based on “function blocks.” Function blocks are representations of different types of application functions; they are algorithms to calculate outputs based on information given to them.
One good example of a function block is the PID block. A diagram representing this important block is shown
below.
below.
The PID function block is key to many process control strategies. There are six inputs and two outputs on the right. For most
applications, only the “IN” and “OUT” are used; the other inputs are for cascade, feed-forward, and track value – which locks the output at the last value in case of alarm. PID tuning parameters are not included in the function block; they are entered with the configuration software.
applications, only the “IN” and “OUT” are used; the other inputs are for cascade, feed-forward, and track value – which locks the output at the last value in case of alarm. PID tuning parameters are not included in the function block; they are entered with the configuration software.
Fieldbus-based control
In the Fieldbus Control System (FCS) the control strategy and calculations are distributed over the fieldbus network.
Distributing control to the field instruments achieves single-loop integrity for safe and reliable control at all times
Fieldbus can collect and transmit far more variables than other protocols.
Until now, most advanced control algorithms have run on large distributed control systems or as customised solutions in personal computers, using data acquisition boards to collect data from the field and to deliver the control output signal.
In the Fieldbus Control System (FCS) the control strategy and calculations are distributed over the fieldbus
network. The PCs don’t need to perform the calculations anymore; they are used basically as operator interfaces, to visualise and operate the process.
network. The PCs don’t need to perform the calculations anymore; they are used basically as operator interfaces, to visualise and operate the process.
Distributing control to the field instruments achieves single-loop integrity for safe and reliable control at all times. Field control provides true parallel processing and very high capacity even with low controller loading. In the FCS an added field device means additional resources, as opposed to legacy systems where it means less resources to spare.
Fieldbus can collect and transmit far more variables than other protocols. It also contains built-in diagnostics
that can be used in the control system as well as for maintenance and enterprise resource planning (ERP) purposes.
that can be used in the control system as well as for maintenance and enterprise resource planning (ERP) purposes.
Business related information such as production and inventory reports may also be disseminated throughout the
enterprise in real-time on the same network. This ability to “mine” live data enables users to run the company more efficiently. When Ethernet is used as a path for both control and manufacturing information on the same network, the result is a “flattening” of the traditional layers of system architecture. This becomes the optimal business and control solution.
enterprise in real-time on the same network. This ability to “mine” live data enables users to run the company more efficiently. When Ethernet is used as a path for both control and manufacturing information on the same network, the result is a “flattening” of the traditional layers of system architecture. This becomes the optimal business and control solution.
We will examine three case studies using fieldbus function blocks: split range, hydrostatic tank gauging and control selector . In each case the architecture of the control system is greatly simplified by the use of fieldbus function blocks.
Distributed Field Interface DFI (Distributed Field Interface) acts as a host device for H1 segments, connecting them to an Ethernet backbone.
Distributing the control task among field devices and multiple DFIs increases the overall reliability of the system.
Users can build systems that meet and exceed the capability of legacy distributed control systems and programmable controllers.
The distributed field interface :
While control strategies in fieldbus networks can be built entirely into the field instruments, there is always a need to interface the fieldbus H1 network and the computers (usually PCs) for configuration and supervision.
DFI (Distributed Field Interface) acts as a host device for H1 segments, connecting them to an Ethernet backbone.
The DFI can house several CPUs, and each one can host four H1 networks. The DFI also provides power for the fieldbus networks and can accommodate digital and analogue I/O cards for local control. Several DFIs may be connected to the same
Ethernet, making very large systems possible.
The DFI can house several CPUs, and each one can host four H1 networks. The DFI also provides power for the fieldbus networks and can accommodate digital and analogue I/O cards for local control. Several DFIs may be connected to the same
Ethernet, making very large systems possible.
The DFI is a key interfacing element in the distributed architecture of a Fieldbus system. Distributing the control task among field devices and multiple DFIs increases the overall reliability of the system. It gives the operator access to modes, setpoints and tuning parameters. Through the DFI a wide range of function blocks can be instantiated* in field devices that
have such capability. Users can build systems that meet and exceed the capability of legacy distributed control systems and programmable controllers.
have such capability. Users can build systems that meet and exceed the capability of legacy distributed control systems and programmable controllers.
A key feature of the DFI is its ability to perform bridging tasks between different DFIs connected to the Ethernet. A user could have, for example, an analogue input AI function block running in a pressure transmitter linked to a PID block running in a positioner connected to another DFI.
With digital and analogue I/O cards, there is no need to interface a PLC to the H1 system. All digital interlocks and sequencing (normally performed by a PLC executing ladder logic) can be programmed with the configuration software and executed on the DFI.
Wiring of DFI nodes and workstation nodes is physically arranged in a star topology using Ethernet hubs, but is logically connected to the same bus. This topology ensures that a problem with one node or segment does not affect the communication with other nodes.Switched networks ensure deterministic communications. They enable Ethernet to
be used as a control level network, passing time critical control variables and alarms as well as configurations and diagnostics.
be used as a control level network, passing time critical control variables and alarms as well as configurations and diagnostics.
In Foundation Fieldbus networks, the network communication schedule is done by a communication master called the
“Link Active Scheduler.” The LAS can be the DFI or any interface board inside a computer connected to the network. In case of a failure, a field device, acting as a “back-up” master, can perform the function of the LAS.
“Link Active Scheduler.” The LAS can be the DFI or any interface board inside a computer connected to the network. In case of a failure, a field device, acting as a “back-up” master, can perform the function of the LAS.
Application – Split Range
Depending upon pre-determined circumstances, the split range must select which of the twooutputs is to be used at a given time.

Split range (also called “duplex”) has one input and two outputs. Depending upon pre-determined circumstances, the split range must select which of the twooutputs is to be used at a given time.
A good example of split range is a pressurised tank filled with reacting chemicals. An inlet valve near the bottom of the tank introduces the chemical products. A second valve, near the top of the tank, acts as a vent valve that controls the pressure of the gas above the liquid. It remains shut while the chemicals are being brought into the tank. Once the chemicals are in the tank and the tank is about 50% full, (or if the pressure hits the setpoint value) the lower valve closes so that no more liquids are introduced to the tank.
A chemical reaction occurs inside the tank which produces gas and increases the pressure in the atmosphere above
the liquid level. It is required that the tank maintain the atmosphere above the liquid at a pre-determined pressure (setpoint).
the liquid level. It is required that the tank maintain the atmosphere above the liquid at a pre-determined pressure (setpoint).
To do this, the upper vent valve opens. Only one pressure transmitter, located above the liquid level, and two
valve positioners are used for this application.
valve positioners are used for this application.
This application is solved in Foundation Fieldbus using function block language.
For this application we need:
•one input: the analogue input AI block;
•two outputs: the two analogue output AO blocks;
•one PID control block and
•one Splitter control module SPLT.
All five blocks are instantiated inside the pressure transmitter and two valve positioners. The AI block is instantiated inside the pressure transmitter; the three red-coloured blocks PID, SPLT, and AO are instantiated in one positioner and internally linked. The other AO block is in the other positioner which must be connected via an external link – the fieldbus cable. No other electronic board or interface is needed.
The advantage of having truly distributed control becomes clear in this example, where split range control can be done by valves even when they are separated by a large distance. The Split-Range function block has one input and two configurable outputs. These four points can be chosen according to the user’s needs.
Application – Hydrostatic Tank Gauging Hydrostatic Tank Gauging system is multiple measurement system for
liquid inventory and process measurements.
liquid inventory and process measurements.
Hydrostatic Tank Gauging
HTG (hydrostatic tank gauging) is a method that uses a combination of pressure and temperature measurements to
provide an automated, multiple measurement system for liquid inventory and process measurements. These could be mass, density, volume, level and temperature.
provide an automated, multiple measurement system for liquid inventory and process measurements. These could be mass, density, volume, level and temperature.
HTG is made extremely simple with fieldbus. Using standard function blocks to resolve the calculations in the pressure and temperature transmitters is much easier than configuring any proprietary-protocol HIU (HTG Interface Unit). Furthermore, the costs involved are smaller since there is no need to use HIUs, which in most applications require expensive explosion proof housings.
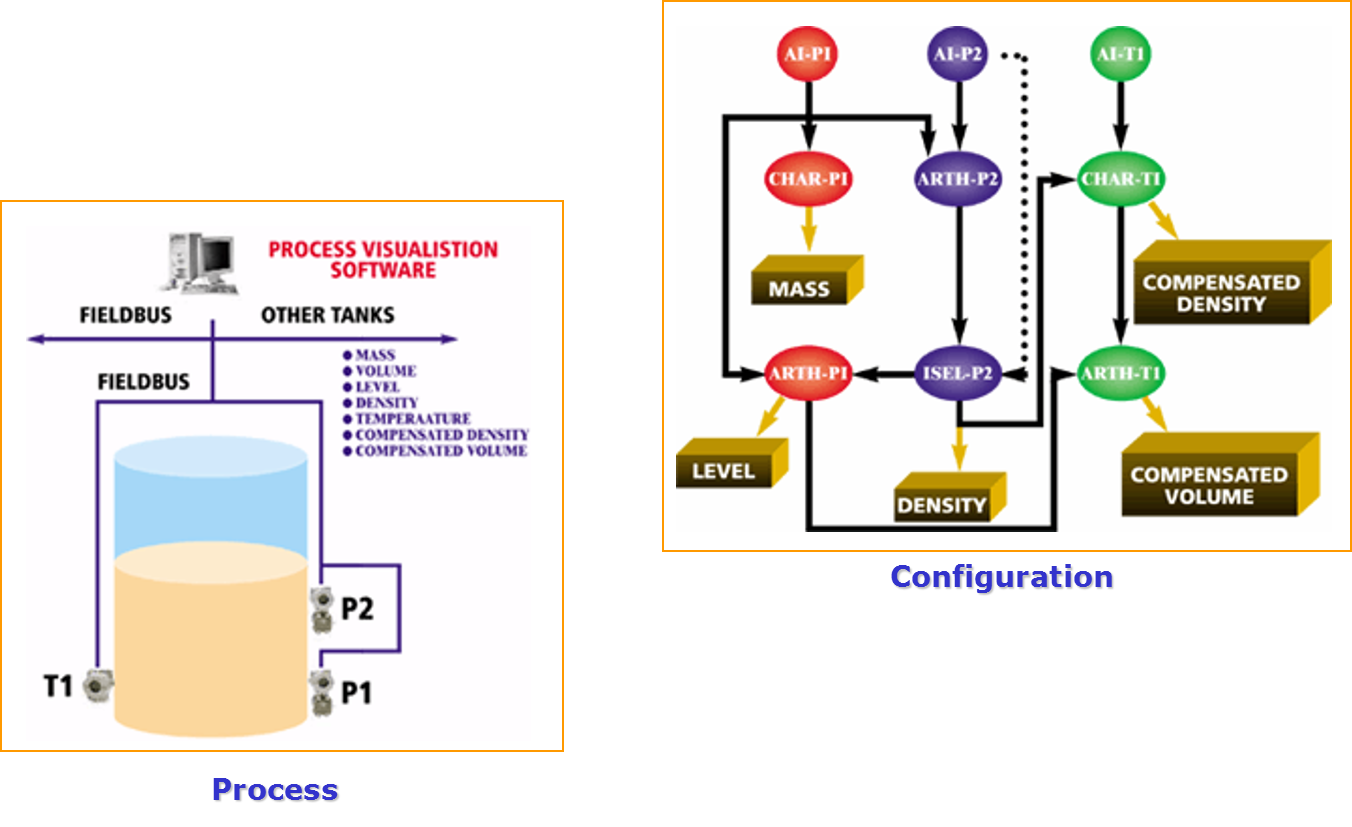
In the HTG control strategy, note all related calculations are performed by function blocks running inside pressure and temperature transmitters. The communication protocol between the field devices is the standard Foundation Fieldbus which allows the user to interchange and inter-operate devices from different vendors.
All the necessary calculations for the HTG system are processed in the field transmitters distributed in the function blocks:
•Pressure transmitter P1 – analogue input (AI), characterisation (CHAR) and arithmetic (ARTH);
•Pressure transmitter P2 – analogue input (AI), arithmetic (ARTH) and signal selector (ISEL). The signal selector function block is necessary to freeze the density calculation when the level in the tank is close to the P2 transmitter;
•Temperature transmitter TT – analogue input (AI), characterisation (CHAR) and arithmetic (ARTH). Basically, the HTG strategy is done as follows: The pressure transmitter P1 is the bottom transmitter and functions as a “level” transmitter. Actually it is measuring pressure (pressure = force/area) and so pressure = mass*g/area. As g and area are constants, the
pressure of P1 is proportional to the mass. But here we must use a CHAR block instead a ARTH block to relate the pressure to the mass because the tank is not a perfect cylinder. The output of the CHAR block is the mass value.
pressure of P1 is proportional to the mass. But here we must use a CHAR block instead a ARTH block to relate the pressure to the mass because the tank is not a perfect cylinder. The output of the CHAR block is the mass value.
In the same transmitter (P1), there is another block, the ARTH block, which calculates the level considering the density. This is necessary because level, when measured through pressure transmitter, is proportional to density:
Pressure = density*g*level.
Density is calculated by another ARTH block, located inside pressure transmitter P2, which is above the transmitter P1. The distance d between transmitters P1 and P2 is determined according to tank characteristics. So using the inputs from the transmitters P1 and P2, the density is calculated as follows:
Density = (P1 – P2)/g*d,
where d = distance between transmitters P1 and P2. Of course, the tank liquid level should never drop below the position where the transmitter P2 is located. If this happens a low-level alarm is generated by the AI function block that activates the ISEL block.
The ISEL block selects between the actual reading and the last output reading, so in case of low alarm on transmitter P2 the output will be switched to the last value.
The ISEL block selects between the actual reading and the last output reading, so in case of low alarm on transmitter P2 the output will be switched to the last value.
The temperature transmitter performs the compensation of the measured values of density and volume according to the actual temperature. This is necessary mainly for commercial reasons, since normally liquids are bought and sold according to volume.
The control selector is capable of selecting any control output (like a PID output). It can also provide status handling information needed by Fieldbus communication.

Control Selector :
The control selector is a solution to override a control application. In the four-stage batch control example shown here, the differential pressure of the reactor is controlled only in one stage, using the valve of a pipe that receives the final product from four reactors. There are four pressure transmitters, one for each reactor, and only one final element (the valve). We will create a control selector application using the CST (constant) and ISEL (input selector) function blocks, all them instantiated inside the field devices.
The control selector is capable of selecting any control output (like a PID output). It can also provide status handling information needed by fieldbus communication.
The control selector solution It is possible to create an application where there are four PID control loops using the same analogue output (AO) block. It doesn’t matter what kind of input the PID blocks are receiving but in this example the inputs are analogue inputs (AI).
The ISEL function block has four analogue inputs and for each analogue input there is a digital input to enable
or disable it. The CST block has two digital outputs that can be used to enable or disable the ISEL inputs. As the ISEL has
four inputs, two CST blocks are needed. The CST digital outputs can be changed through the man-machine interface used, either directly by the operator or by a batch sequence – almost in the same way the operator changes the setpoint of a control loop.
or disable it. The CST block has two digital outputs that can be used to enable or disable the ISEL inputs. As the ISEL has
four inputs, two CST blocks are needed. The CST digital outputs can be changed through the man-machine interface used, either directly by the operator or by a batch sequence – almost in the same way the operator changes the setpoint of a control loop.
To perform the selection, for example, of the loop 2 (AI2 – PID2), the outputs DIS1, DIS3, DIS4 have to be set to the digital logic level “1” and the output DIS2 to the digital logic level “0.”
There is another advantage of using constant blocks. As CST has several analogue outputs available, one can use
them to link into non-used ISEL inputs. This can be useful if you want to configure the output with a value different of the fault state value.
them to link into non-used ISEL inputs. This can be useful if you want to configure the output with a value different of the fault state value.
I was suggested this web site by my cousin. I am not sure whether this post is written by him as no one else know such detailed about my problem. You’re incredible! Thanks!