

This article is developed to provide guidance on the tests conducted on the motor throughout its construction, as well as the final tests conducted during the FAT. The ultimate objective is to be aware of the tests that are to be conducted during the FAT, and to clarify the criteria for motor final acceptance.
Guide on Induction Motors Factory Acceptance Test Procedures
Industry Codes and Standards
American Petroleum Institute (API)
API STD 541 Form-wound Squirel-cage Induction Motors
International Electrotechnical Commission (IEC)
IEC 60034 Rotating Electrical Machines (Series)
IEC 60894 Test Procedure for the Measurement of Loss Tangent of Coils and Bars for Machine Windings.
International of Electrical and Electronics Engineers (IEEE)
IEEE 43 Recommended Practice for Testing Insulation Resistance of Rotating Machinery.
IEEE 62.2 Guide for Diagnostic Field Testing of Electric Power Apparatus.
IEEE 112 Test Procedure for Polyphase Induction Motors and Generators.
IEEE 286 Practice for Measurement of Power Factor Tip-Up of Electric Machinery Stator Coil Insulation.
IEEE 522 Guide for Testing Turn Insulation of Form-Wound Stator Coils for AC Electric Machines.
IEEE 1434 Guide to the Measurement of Partial Discharges in Rotating Machinery
International Standardization Organization
ISO 3744 Acoustics – Determination of Sound Power Levels of Noise Sources Using Sound Pressure.
National Electrical Manufacturers Association (NEMA)
ANSI/NEMA MG 1 Motor and Generators
Motor Pre-FAT Tests
The following tests have been conducted throughout the construction process of the motor. Most of these tests have either been witnessed or their documents reviewed earlier and approved, as agreed in the ITP and Inspection Requirements. A review of these documents, at the time of the FAT, is an added quality check.
1. Stator Core Test (17-SAMSS-502/ para. 4.3.4.1)
This test is designed to evaluate the quality of the stacked core and the insulation between the core laminations. Current is injected through loops around the stator core (not inside the slots), inducing flux densities simulating a real
machine, usually in the range of 1 to 1.5 Tesla, as per IEEE 62.2, section 7.2.
The test is conducted for a minimum of 30 minutes to allow for a rise in core temperature. The search for any hot spots, 5°C above the surroundings, should be conducted using an infrared camera.
2. Surge Comparison Test (17-SAMSS-502/ para. 4.3.4.2)
Also known as the impulse test, it is designed to detect main insulation and inter-turn insulation integrity of the stator windings. This test is a comparative one, and a change in the wave form indicates a short circuit between turns. Test
details and voltage levels and rise time specific values are clear in IEEE 522, section 6 or IEC 60034-15.
Test of main insulation is conducted by applying three successive voltage impulses of 5pμ voltage.

Test of inter-turn insulation consists of successive voltage impulses of 2.0, 3.5 and 5 pμ, with a rise time of 0.1 to 0.2 μs.
3. Power Factor Tip-Up Test (17-SAMSS-502/ para. 4.3.4.3)
Also known as the Dissipation Factor (DF) as well as tan-delta (Tan δ), this test reflects the density of voids in the stator winding insulation, and the existence of the corona or slot partial discharge (PD). PD consumes energy as it occurs, and
its occurrence increases with higher voltages, thus, this test identifies the amount of PD activity by measuring the energy it consumes.

The test results are presented in the form of a curve of the power factor as a function of the line-to-ground voltage. A fast change in the power factor tends to indicate a coil with many voids.

The test is done at 25% and 100% of rated voltage, and the tip-up is the PF in % at the higher voltage minus that at the lower voltage, and should not exceed 1% otherwise the results should be reviewed and evaluated (IEEE 286 or IEC 60894).
4. Sealed Winding Conformance Test (17-SAMSS-502/ para. 4.3.4.4)
The cab can be accomplished by two methods, first submerging the complete stator in a water tank, and the second by spraying the windings with water for 30 minutes. In both cases, the water must consist of a wetting agent. The test is
detailed in NEMA MG 1, section 20.18, and consists of the following steps:
- Test the winding insulation with 500 V DC for 10 minutes, correct the values to 40°C, and compare to acceptable limits in IEEE 43.
- Conduct a Hi-pot test at 1.15 rated line to line rms voltage for 1 minute.
- Repeat the test of step 1, for 1 minute.
5. Partial Discharge
This test is conducted on each phase of the stator winding, as it measures the high frequency current discharge pulses, resulting due to voids in the insulation and corona. The readings are usually taken through a capacitive link between the winding and measurement equipment. Alternatives include the use of a corona camera probe, ultrasonic probe, blackout or ultraviolet imaging, and most recently online PD measurement. The use of online PD monitoring is increasing, as it can assist in avoiding sudden failure and unplanned outages.
As a minimum, Partial Discharge Inception Voltage (PDIV) and Partial Discharge Extinction Voltage (PDEV) shall be recorded for each phase as well as power supply frequency, temperature and humidity at the time of test. The acceptance criteria shall be mutually agreed upon between the vendor and purchaser prior to performing the tests (IEEE 1434/para. 10.2 or IEC 60034-27).
6. Probe-Track Run-out and Rotor Balancing
- The probe track run-out should have been obtained with the shaft supported on v-blocks, and the readings not exceeding 13 micrometers (17-SAMSS-502/ para. 2.4.5.1.7a).
- Rotor final balancing in a balancing machine shall not exceed pre-defined limits for residual unbalance in the correction plane (API STD 541/para. 2.4.6.3.4).
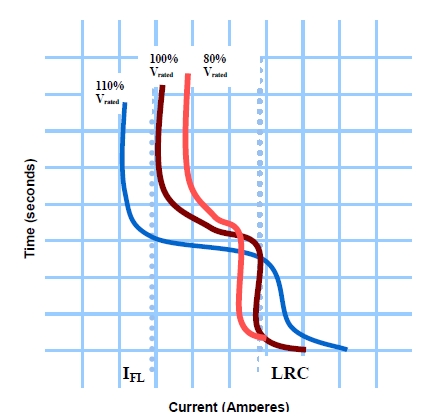
7. Current-Time Characteristics
The current-time characteristics diagram represents the stator current Vs time at 80%, 100% and usually at 110% of rated voltage. Current-time characteristics will be presented similar to the figure.
Differential Self Balancing Protection CT Test
The differential self balancing CT (50:5 class C20 or higher for each phase) test is performed to determine the CT accuracy and performance. Furthermore, magnetization curve shall be obtained through 13 test points.
Winding and Bearing Resistance temperature detectors (RTDs) Tests
RTDs provided for monitoring stator temperature shall be verified 100-ohm, platinum, three lead type with a temperature coefficient of resistance equal to 0.00385 ohm/ohm/°C.
Motor Factory Acceptance Tests
1. Routine Test
The main goal of conducting the routine test is to insure that the motor is free from electrical and mechanical defects. Therefore, each machine shall undergo the routine test, which consists of the following procedures, per API STD 541, while additional guidelines for these tests can be obtained from NEMA MG 1 and IEEE 112, or IEC 60034-2:
- Measure the no-load current, on each phase, and the exciter field current if applicable.
- Record and plot the locked-rotor current.
- Perform an insulation resistance (IR) test and polarization index (PI)
IR test is performed on the stator and rotor windings, terminal box connections, and all auxiliaries using a mega-ohm-meter device to measure the resistance value between the conductors in different phases, as well as between conductors and ground. As DC voltage is applied, there are four different types of currents that may flow indicating the condition of the insulation; capacitive, conduction, surface leakage, and absorption currents.
For the IR test, the windings are subjected to a DC voltage, per Table 6 of API STD 541, for 1 minute. The readings are sensitive to temperature, and thus, the values are corrected to 40°C, and then compared to the acceptable limit of 100 mega-ohm. (IEEE 43).
PI is the ratio between the IR readings at 10 minutes and at 1 minute. This test is used to measure the degree of dryness and cleanliness of a winding. The minimum PI measured values must be higher than 2 for Class B and F insulation. But for new windings, a minimum of 3 is more practical.
The PI test is usually conducted before a Hi-Pot test, to make sure that the winding is dry to avoid unnecessary damage to the windings, and again after the hi-pot to insure the windings integrity.
- Measure stator winding resistance
A digital low resistance meter that uses DC voltage should be used. The resistance value of the winding is measured at room temperature between the winding terminals, or if the star connection is not open, between each two phases. Large machines have relatively low resistance values, so readings must consist of at least 3 decimal places for accuracy and comparison. The test is performed on stator and rotor windings, and the variance between phases/poles should not exceed 1%.
- Measure vibration
Vibration testing and measurement guide is available in the Dynamic Analysis Best Practice (SABP-G-006), with reference to 17-SAMSS-502/para 2.4.6.4.1, NEMA MG 1 and IEC 60034-14.
- Measure bearing insulation resistance
Check the resistance measurement across the bearing to verify bearing insulation integrity. A megaohm-meter should be used.
- Monitor bearing temperature rise
The motor shall be operated at no load for at least 1 hour after the bearing temperatures have stabilized. This is to verify no excessive noise from the bearings.
- Inspect the bearings and oil supply, if applicable
Following the running test, the sleeve bearings top and bottom halves must be completely removed and the shaft journals and bearings must be inspected. A minimum of 80% surface contact shall be evident between the shaft journal and the bearing bore, with no edge loading. If the lubricant can be accessed, its condition should be examined for search of discoloration of availability of particles, following the run test.
- Measure machine air gap, and exciter air gap if applicable
Air gap must be measured from at least three different positions, and at identical positions on both sides of the rotor. The most ideal measurement locations are at the 3, 6, 9, and 12 o’clock positions. Percent variation shall not exceed 10% (API STD 541/ para. 2.4.7.2.4).
- Measure shaft voltage and current
Unbalance in the magnetic circuits, or in the windings phase currents, can create additional flux linkages that can interact with the shaft and produce a potential difference between both sides of the shaft. This could develop a circulating current if the bearings are not insulated, or a high voltage buildup on the shaft when both bearings are insulated.
Therefore, either shaft voltage measurement is required to insure no deficiencies in the motor. (IEEE 112 /para. 8.3).
- Conduct the high-potential test on the stator windings, space heaters, and RTDs
The Hi-pot test is usually the final test conducted on the motor, and its objective is to test for major flaws in the winding insulation, as this high voltage would cause insulation breakdown at the defect. It is considered a potentially-destructive test, and the result is a pass/not pass motor.
Caution must be taken into consideration and assurance of the correct voltage is applied for the required one minute. An equivalent DC test is possible with prior approval, but the AC test is more indicative of the machine condition, and the applied voltage, for one minute, shall be as follows:

2. Complete Test
Unless otherwise specified, a complete test is required on a single motor of a series of identical design to insure the correct design and performance of this specific design. This applicable for all motors rated 6.6 kV and above and all
motors rated above 3700 kW (5000 HP). This test consists of the following procedures, per API STD 541, while additional guidelines for these tests can be obtained from NEMA MG 1 and IEEE 112, or IEC 60034-2:
- Verify efficiency and power factor at 100%, 75%, and 50% of full load
The determination will be performed by one of the methods described in IEEE 112, section 6, whether by loading the motor with a dynamometer (Method B), duplicate motor loading (Method C), or equivalent circuit calculations (Method F). Power factor is determined per IEEE 112, section 5.11. Also, IEC 60034-2 calculation methods are an acceptable
alternative.
- Determine the locked-rotor current and power factor
The rotor is mechanically locked to record power measurement readings at the locked rotor position. Applying full voltage may not be practical, and an acceptable alternative is to use an acceleration test. Test procedure is detailed in IEEE 112/ section 7.2.
- Determine full-load current, and slip
By loading the motor, it will be possible to identify the induction motor slip associated with the full-load conditions.
- Determine the torque values, at locked-rotor and breakdown
Details of the four different methods in developing the torque-speed curve are mentioned in IEEE 112/ section 7.3, which vary from relying on measured output to acceleration to input to direct measurement. A sample of a torque-speed curve is shown below.
- Determine the actual speed-torque curves
These figures are plotted based on results and calculations using data from the open circuit and short circuit tests.

- Measure the noise attenuation of the motor
This test is described in SABP-G-006. During the test, the motor shall be operating at no load, full voltage, rated frequency, and sinusoidal power, and the measurement shall be per NEMA MG 1 or ISO 3744.
- Measurement of losses
Losses consist of stator and rotor copper (I2R) losses, iron core losses, stray-load losses, and friction and windage losses. The no-load test, and short-circuit test are all used to calculate these machine losses. (IEEE 112 or IEC 60034-2).
3. Heat-Run Test
Unless otherwise specified, a heat run test (also known as the temperature rise test) is required on a single motor of a series of identical design to insure the correct design and performance of this specific design.
- This test is intended to monitor several parameters and track their rate of change over the complete test. These parameters include the following:
Stator winding temperature
Bearing temperature
Lube oil temperature (must be preheated if used from a common oil system)
Cooling air inlet/outlet temperature (if applicable)
Cooling water inlet/outlet temperature and flow (if applicable)
Vibration; vibration readings must fall within acceptable limits when the motor is unloaded, while readings throughout the run test are for trending. - The heat run must be conducted at full load, for four hours or until the bearing and stator winding temperatures stabilize. The test must comply with one of the procedures of IEC 60034-29, or IEEE 112, section 5.8.3, which specifies different methods of loading the motor.
Actual loading method: the machine is mechanically coupled and loaded.
Dual-frequency method: the motor is connected to the main power supply at rated frequency, and connected to a secondary supply at approximately 80% or 120% of the rated frequency, as shown in the following illustration.

Forward stall equivalent loading method: the least common of the three, the motor will be connected to a driver, rotating at rated speed, and connected to a reduced voltage and frequency supply. The frequency is usually 20% to 25% less than the rated value.
- The stator winding resistance is measured while the stator is hot, as soon as possible following switching off the motor. The value decreases as the winding cools down, therefore, the reading is extrapolated to the instant the motor was switched off.
Note: Compliance to International standard Specifications is required by using the stator RTD measurement, not the stator winding resistance.
Induction Motors FAT Checklist
| Test | Acceptable | Not Acceptable | Notes |
Pre FAT Tests
| Stator Core | |||
| Surge Comparison | |||
| Power Factor Tip-Up | |||
| Sealed Winding Conformance | |||
| Partial Discharge | |||
| Probe-Track Runout | |||
| Rotor Balancing | |||
| Excitation Control Panel | |||
| Diff Self Balance CT Test | |||
| Winding & Bearing RTD Test |
FAT Tests
| No-load current | |||
| High-potential | |||
| Insulation resistance (IR) | |||
| Polarization index (PI) | |||
| Stator winding resistance | |||
| Vibration | |||
| Bearing insulation resistance | |||
| Bearing temperature rise | |||
| Inspection of bearings and oil supply | |||
| Machine air gap |
| Shaft voltage | |||
| Efficiency at 100%, 75%, and 50% of full load | |||
| Power factor | |||
| Locked-rotor current and power factor | |||
| Full-load current | |||
| Induction motor slip | |||
| Torque values, at locked-rotor and breakdown | |||
| Speed-Torque curve | |||
| Noise attenuation | |||
| Motor losses |
Heat-Run Test
| Stator winding temperature | |||
| Bearing temperature | |||
| Lube oil temperature | |||
| Cooling air inlet/outlet temperature | |||
| Cooling water inlet/outlet temperature and flow | |||
| Vibration |