Tactile imaging, also known as tactile display or tactile feedback, is a technology that allows users to interact with virtual or remote environments by providing them with a sense of touch or tactile sensations. It aims to bridge the gap between the visual and auditory aspects of digital experiences by incorporating the sense of touch into human-computer interactions.
What is Tactile Imaging?
Tactile imaging systems typically consist of hardware and software components designed to simulate the sensation of touch. These systems can be used in various applications, ranging from virtual reality (VR) and augmented reality (AR) to medical simulations and remote control operations.
The main principle behind tactile imaging is to generate tactile feedback that corresponds to the user’s interactions with virtual or remote objects. This feedback can include sensations such as pressure, texture, vibration, and even temperature, depending on the sophistication of the system.
One of the key components of tactile imaging systems is the actuator or haptic device. Actuators are responsible for creating physical sensations that users can feel through touch. Different types of actuators are used to simulate various tactile sensations. For example, vibrotactile actuators produce vibrations to convey sensations like impact or texture, while pneumatic or electrostatic actuators can create pressure-like sensations.
Tactile imaging has a wide range of applications:
- Virtual Reality and Gaming: In VR and gaming applications, tactile imaging enhances the immersive experience by allowing users to feel the virtual environment and interact with objects within it. This can include feeling the texture of surfaces, sensing impacts, and experiencing vibrations corresponding to in-game events.
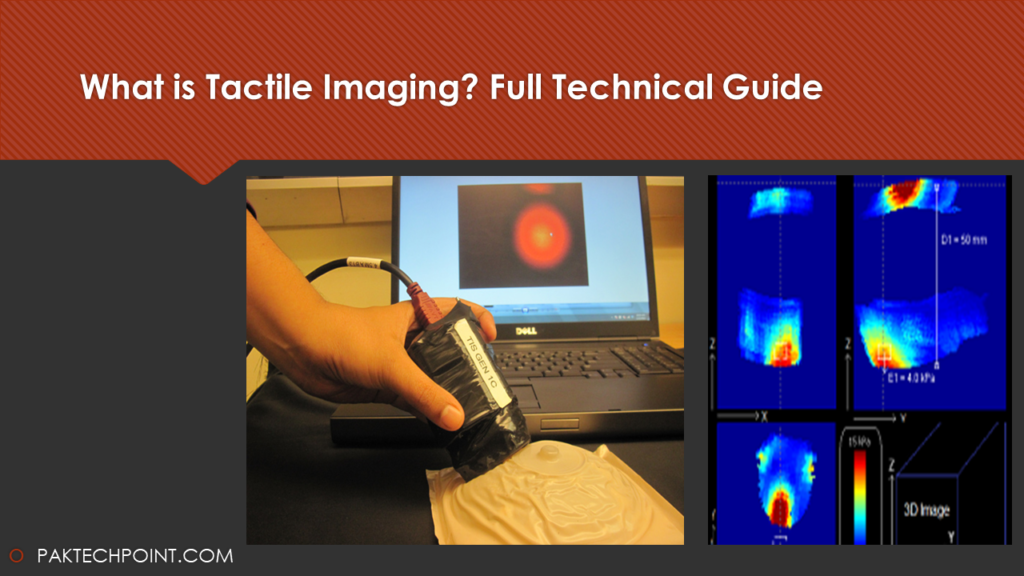
- Medical Simulations: Tactile imaging is used in medical training and simulations to provide students and practitioners with realistic haptic feedback. Surgeons, for example, can practice surgical procedures on virtual patients while feeling the resistance and feedback similar to real tissue.
- Remote Operations: Tactile feedback is crucial in remote control operations, such as robot-assisted surgery and hazardous tasks in environments that are difficult for humans to access. Tactile imaging helps operators feel the forces and constraints their remote tools encounter.
- Accessibility: Tactile imaging can enhance the accessibility of digital interfaces for individuals with visual impairments. It allows them to “feel” graphical elements and receive feedback from touchscreen devices.
- Design and Engineering: Tactile imaging assists designers and engineers in prototyping and testing by providing physical feedback during the development of products and systems.
Tactile imaging technology is advancing rapidly, enabling more precise and sophisticated tactile sensations. Researchers and engineers continue to explore ways to improve the realism and fidelity of tactile feedback, making it an integral part of immersive and interactive digital experiences.
Read Also: What is Acoustic Imaging? Technical Guide A to Z
Tactile Imaging Technical Details:
Tactile imaging, unlike optical and acoustic imaging, involves establishing mechanical contact between a sensor and an object. This approach offers both advantages and drawbacks. One disadvantage is the potential mechanical load imposed on the object, which might cause movement or compression. Moreover, tactile imaging requires actively moving the sensor towards the object. On the positive side, tac tile imaging enables the acquisition of force-related information (such as touch force and torque) and mechanical characteristics of the object (like elasticity, resilience, and surface texture). Another advantage over optical imaging is the resistance to environmental conditions. The versatility of tactile sensors makes them particularly appealing for control purposes, especially in assembly processes. Additionally, tactile and visual data can be combined, harnessing the strengths of both modalities.
In robotics, tactile imaging is commonly integrated with gripping actions. To achieve real-time control, the tactile sensor should be integrated into the robot’s gripper. This setup allows simultaneous measurements of force distribution and position during the gripper’s motion. As a result, continuous force control and position correction can be achieved.
In inspection systems like coordinate measuring machines, a tactile sensor is employed as the end effector while the object under examination is mechanically scanned using a motion mechanism. The machine is controlled to follow a specific path along the object while maintaining a consistent touch force. Position data is determined through reverse transformation of the tip (sensor) coordinates to world coordinates. Although the scanning process might be slow, it can achieve remarkable accuracy, down to 10 nanometers in all three dimensions.